The research group FGDES develops methods for the analysis and sythnesis of discrete-event systems with a particular focus on modular and/or hierarchical architectures. Here, discrete-event systems are dynamical systems with a finite-range state variable. Prototypical application domains are so called “men made systems”, e.g., for automated manufacturing or logistics, which by construction can be adequately represented by discrete-event models.
Contact
Prof. Dr.-Ing. Thomas Moor
Tel.: +49 9131 85-27129
E-Mail | FGDES Homepage
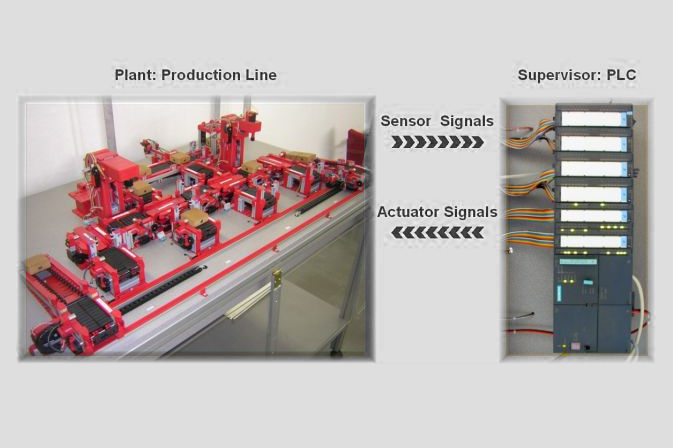
How to generate a PLC-program that operates the plant ? The laboratory model below represents a flexible manufacturing system. It consists of 29 interacting electro-mechanical components (conveyor belts, pusher, stack-feeder etc.), equipped with 25 actuators (DC-motors) and 57 sensors (key-switches, inductive sensors). The traditional engineering solution to operate the manufacturing system is to program a logic controller (PLC) such that it activates the appropriate motors in reaction on sensor events. This approach crucially relies on the programmer, who must consider any possible configuration of the system. While methods from software engineering assist the programmer and increase productivity, the process by principle remains error prone and unsafe.
Control Theory for Discrete Event Systems! The manufacturing system can be formally modelled as a discrete-event system (DES). In contrast to continuous states and continuous time used in physically motivated models, discrete-event systems are characterized by discrete and qualitative changes of (symbolic) state values caused by the occurrence of asynchronous discrete events. In the context of our example, the control theoretic perspective on this system class is of a particular interest: given the formal model of the manufacturing system (plant dynamics) and the desired behaviour (formal specification), how can one systematically derive the required PLC program (controller dynamics) that makes ends meet?
Supervisory control theory (SCT) is a framework that provides an answer to the above question, first proposed by P.J. Ramadge and W.M. Wonham in the late 1980s. Since then, many researchers have contributed, including our group, with a particular focus on hierarchical, decentralized and/or modular control system architectures. At the time of writing, the required controller dynamics for systems of the complexity as our laboratory model can be synthesised easily by methods from supervisory control theory. Ongoing projects address the integration of synthesis algorithms with the work-flow of PLC programming, open questions related to fault detection and diagnosis, as well as network implementations of distributed supervision.
Further Directions: The research group FGDES provides the software tools libFAUDES, DESTool, CompileDES and FlexFact via the FGDES homepage.
2022
- , :
Compositional Verification of Non-Blockingness with Prioritised Events
16th IFAC Workshop on Discrete Event Systems (WODES) (Prague)
In: IFAC PAPERSONLINE, AMSTERDAM: 2022
DOI: 10.1016/j.ifacol.2022.10.348 - , :
Abstraction Based Supervisory Control for Non-Regular ∗-Languages
16th IFAC Workshop on Discrete Event Systems (Prag, 6. September 2022 - 8. September 2022)
DOI: 10.1016/j.ifacol.2022.10.336
2021
- , :
Compositional Verification of Finite Automata under Event Preemption
60th IEEE Conference on Decision and Control (CDC) (, ELECTR NETWORK)
In: 2021 60TH IEEE CONFERENCE ON DECISION AND CONTROL (CDC), NEW YORK: 2021
DOI: 10.1109/CDC45484.2021.9682897 - , :
Behaviour equivalent max-plus automata for timed petri nets under open-loop race-policy semantics
In: Discrete Event Dynamic Systems: Theory and Applications Topical Collection on Control 2022 (2021)
ISSN: 1573-7594
DOI: 10.1007/s10626-021-00346-0
2020
- , :
Behaviour Equivalent Max-Plus Automata for a Class of Timed Petri Nets
15th IFAC Workshop on Discrete Event Systems (Rio de Janeiro, 11. November 2020 - 13. November 2020)
In: 15th IFAC Workshop on Discrete Event Systems 2020
DOI: 10.1016/j.ifacol.2021.04.049
2018
- , , :
On the Relation between Reactive Synthesis and Supervisory Control of Input/Output Behaviours
Workshop on Discrete Event Systems
DOI: 10.1016/j.ifacol.2018.06.275
A more comprehensive list is given on the FGDES homepage.