The development of control and optimization methods for dynamical systems is the natural research focus of the Chair of Automatic Control. In particular, we focus on nonlinear and predictive control concepts as well as path/trajectory planning for dynamical systems closely related to optimization-based methods, always having an eye on the real-time and embedded realization for practical applications.
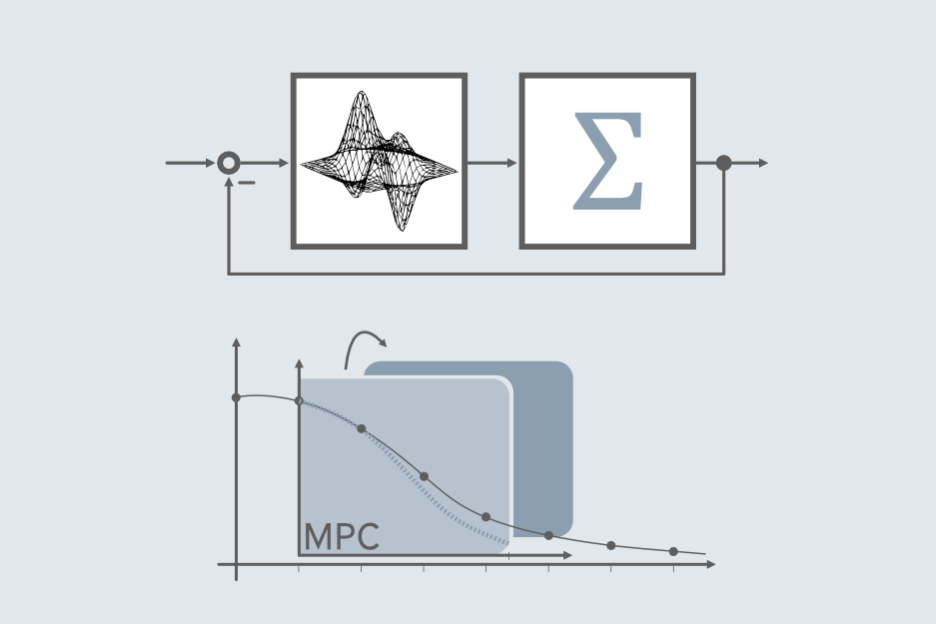
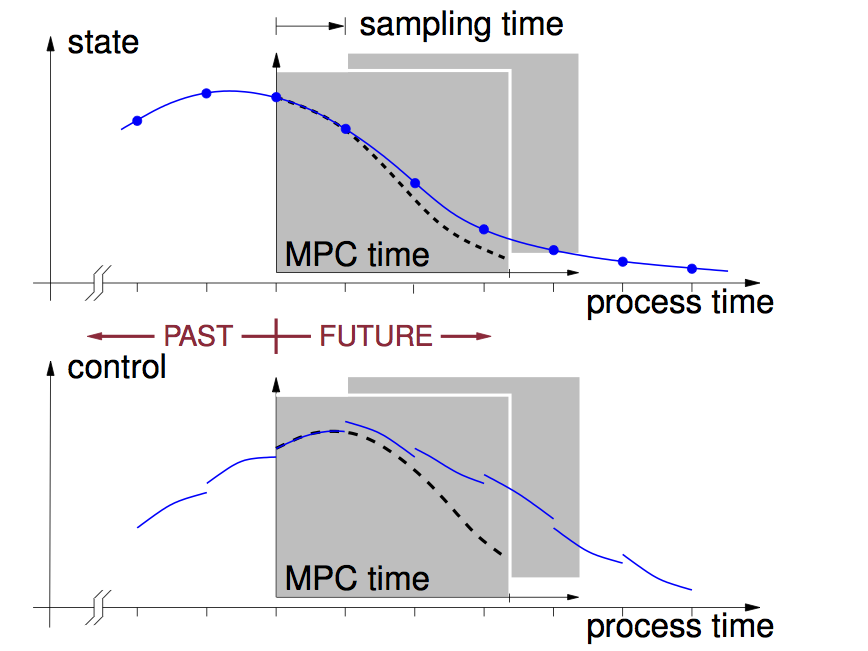
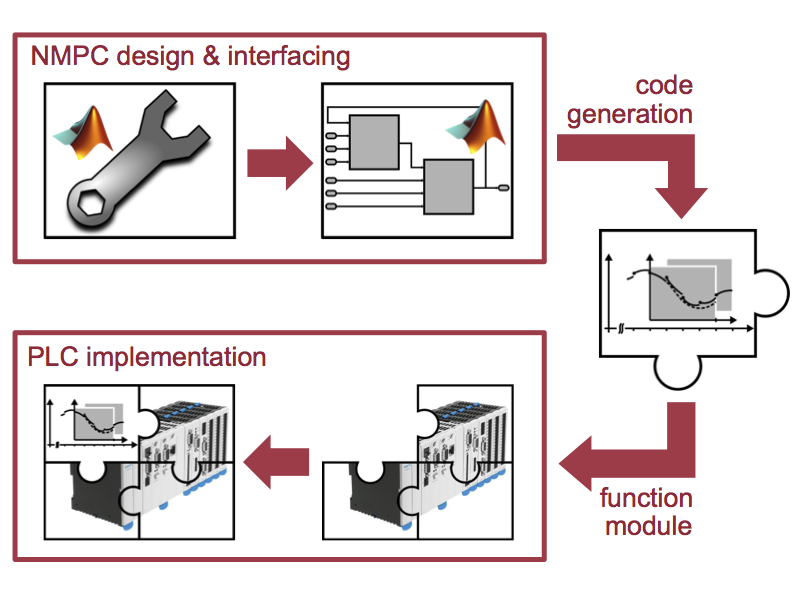
Research on nonlinear systems and control is at the heart of the Chair of Automatic Control. Modern control concepts such as model predictive control (MPC) often rely on optimization problems that have to be solved online. In particular mechatronic systems often require sampling times in the (sub-)millisecond range and therefore highly efficient control algorithms and warm-start strategies. The Chair of Automatic Control has long standing experience with the modeling of control problems of different physical domains and the development of nonlinear and predictive control concepts, always with the intention to bring these methods into practice. We also develop and maintain the open source MPC toolbox GRAMPC that was successfully used in many research and industrial projects and by other research groups. Current research concerns the extension to stochastic nonlinear systems to account for uncertainties in a consistent probabilistic setting.
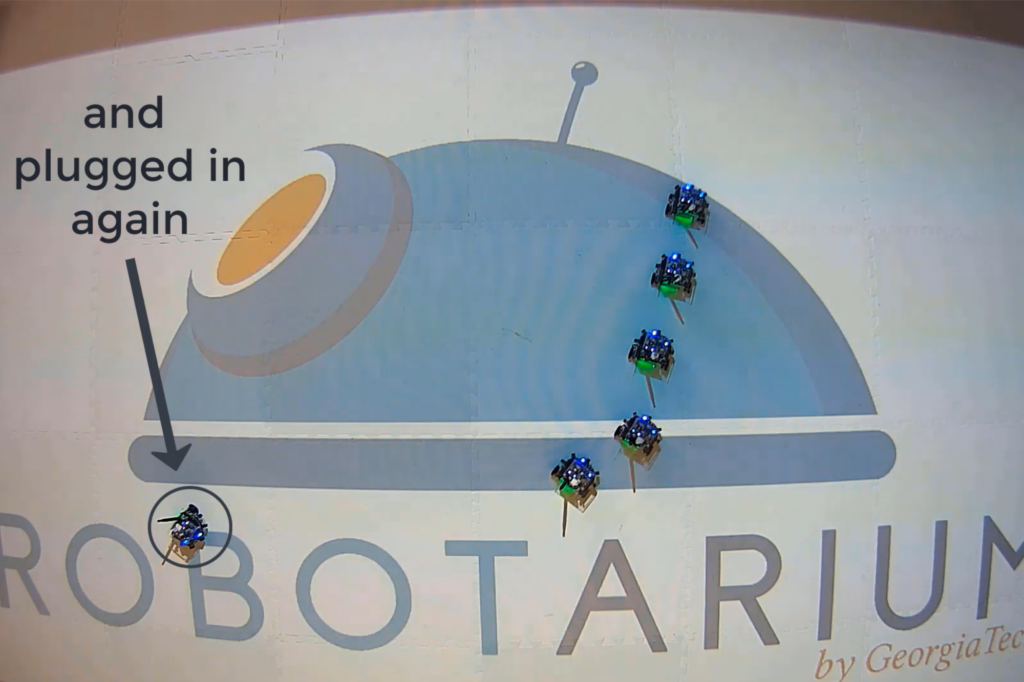
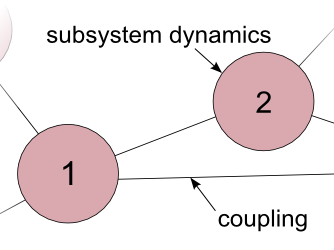
Beyond the “classical” centralized view on control applications, networked systems are of increasing importance, not only in terms of autonomous and mobile robots, distributed energy networks (smart grids), but also in connection with industry 4.0 and flexible production. The control of networked systems is challenging, because centralized approaches do not scale well with the number of subsystems and do not provide the flexibility for plug-and-play or reconfiguration scenarios. We focus on both the design of distributed (model predictive) control schemes for networked systems as well as the agent-based distributed implementation of these concepts along with suitable communication concepts to enhance the overall efficiency of networked systems. An outcome of this research is the open-source framework GRAMPC-D that implements a real-time efficient ADMM algorithm for distributed model predictive control of nonlinear networked systems including plug-and-play functionality.

Videos
Related projects since 2021
Funding source: Industrie
Project leader:

Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Bayerische Forschungsstiftung
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)
Project leader:

Dr.-Ing. Andreas Völz
Senior Lecturer
Dual-armrobots offer a high potential for automation technology, as they canbe used to implement tasks that are not possible with one arm alone.This includes in particular the manipulation of large or heavyobjects that exceed the payload of a single arm. Illustrativeexamples are the movement of beverage crates, long boards or pipes,which are also preferably grasped by humans with both hands.
However,cooperative manipulation is particularly challenging, because botharms…
Funding source: Deutsche Forschungsgemeinschaft (DFG)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG / Schwerpunktprogramm (SPP)
Project leader: , ,
Prof. Dr.-Ing. Knut Graichen
Chair holder
The aim of this project is the automated production of liquid-liquid disperse systems via melt emulsification, whereby in this process emulsification takes place at elevated temperature. The products obtained after cooling are dispersions of spherical nanoparticles or microparticles. Within the scope of this project, a melt emulsification device for the automated production of product particles with a well-defined particle size distribution (PSD) will be further developed. The PSD has a significant influence on the subsequent product properties, such as flow behavior or drug release kinetics. The PSD of the products is determined by the complex interaction of competing mechanisms. These are, in particular, droplet breakup in a rotor-stator device as a result of shear and elongation stress, as well as coalescence and further ripening, which in turn depend on the system composition, i.e. the emulsifier used (type, concentration) and the dispersion phase (viscosity, volume fraction).
Therefore, for a better process understanding and an active process control, possibilities for in situ determination of the PSD are urgently required. In this project, a novel fiber-coupled measurement system based on broadband elastic light scattering is developed for in situ measurement of the PSD. The system will be validated on reference particle systems and applied to the emulsification process. Furthermore, a hybrid process model is developed, which is the basis for the design of a model predictive control of the process. The model predictive control in combination with the in situ measurement will provide the possibility for an active process control and the production of emulsions with predefined properties and a simultaneous optimization of the process time.
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Model Predictive Control (MPC) is a widely used strategy for controlling linear and nonlinear systems. It is based on the iterative solution of a dynamic optimization problem over a receding horizon. For networked and coupled systems, distributed MPC (DMPC) is an attractive extension of MPC, where the central MPC controller is replaced by local MPC agents for the individual subsystems of the global system. The probably most popular DMPC method is ADMM (Alternating Direction Method of Multipliers) that is based on the dual decomposition of the distributed problem.
A promising alternative approach, which has not yet been fully explored in the literature, is sensitivity-based primal decomposition. In this approach, the individual agents explicitly consider the costs of their actions on the neighbors’ performance. These sensitivities can be locally computed in an efficient mannery. Compared to ADMM, sensitivity-based DMPC shows an improved convergence behavior, reduced communication overhead, and lower algorithmic complexity. The efficient local computation of sensitivities and a simpler convergence analysis are further advantages of this method. Despite these advantages, the sensitivity-based approach currently has several shortcomings compared to ADMM. In particular, convergence and stability can only be guaranteed for a maximum prediction horizon and general state couplings are more difficult to consider with primal decomposition.
Therefore, this project aims to conduct an in-depth investigation of the sensitivity-based approach for distributed model predictive control. In particular, the aforementioned shortcomings compared to ADMM shall be addressed, and the overarching topic of sensitivities can be used to increase efficiency and flexibility in numerical solutions, to simplify the methodological analysis, and to enable practical implementation. The findings will be published in the DMPC toolbox GRAMPC-D.
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications since 2020
- , , :
An overview of sensitivity-based distributed optimization and model predictive control
In: At-Automatisierungstechnik 74 (2026), p. 182-196
ISSN: 0178-2312
DOI: 10.1515/auto-2025-0105
- , , , :
Nonlinear MPC for Stabilizing the Longitudinal Dynamics of a Highly Maneuverable Aircraft
IEEE Aerospace Conference (Big Sky, Montana (USA))
In: Proc. 2025 IEEE Aerospace Conference 2025 - , , , , :
Aerodynamic neural network modeling for gradient-based model predictive flight control
33rd Mediterranean Conference on Control and Automation (MED 2025)
In: Proc. 33rd Mediterranean Conference on Control and Automation (MED 2025) 2025 - , , , , :
Time-Optimal Path Parameterization with Viscous Friction and Jerk Constraints based on Reachability Analysis
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Hangzhou, 19. October 2025 - 25. October 2025)
In: Proceedings 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 - , , , :
Embedded Optimization in Control: An Introduction, Opportunities, and Challenges
In: Zhengtao Ding (ed.) (ed.): Encyclopedia of Systems and Control Engineering, Elsevier, 2025, p. 223–244
DOI: 10.1016/B978-0-443-14081-5.00129-X - , :
Learning-based uncertainty-aware predictive control of truck-trailer systems in rough terrain
19th IEEE International Conference on Control & Automation (ICCA) (Tallinn (Estonia), 30. June 2025 - 3. July 2025) - , , , :
Considering multiple objectives in model predictive control for building energy systems
33rd Mediterranean Conference on Control and Automation (MED 2025) (Tangier, Morocco, 11. June 2025 - 13. June 2025)
In: Proceedings 33rd Mediterranean Conference on Control and Automation (MED 2025) 2025
DOI: 10.1109/MED64031.2025.11073406
URL: https://ieeexplore.ieee.org/document/11073406 - , , , , :
Passivity-Based Robust Stability Analysis of the Converter–Grid Interaction and Passivity-Shaping Controller Design
In: IET Generation Transmission & Distribution 19 (2025), Article No.: e70090
ISSN: 1751-8687
DOI: 10.1049/gtd2.70090 - , , :
Adaptive Kalman filtering: Measurement and process noise covariance estimation using Kalman smoothing
In: IEEE Access 13 (2025), p. 11863-11875
ISSN: 2169-3536
DOI: 10.1109/ACCESS.2025.3528348 - , , :
A software framework for stochastic model predictive control of nonlinear continuous-time systems (GRAMPC-S)
In: Optimization and Engineering (2025)
ISSN: 1389-4420
DOI: 10.1007/s11081-025-10006-z - , , :
Stochastic model predictive control with switched latent force models
In: European Journal of Control 85 (2025), p. 101311
ISSN: 0947-3580
DOI: 10.1016/j.ejcon.2025.101366 - , , , :
Sensitivity-based distributed NMPC: Experimental results for a levitating planar motion system
In: IEEE Transactions on Control Systems Technology 33 (2025), p. 1110-1118
ISSN: 1063-6536
DOI: 10.1109/TCST.2025.3530165 - , , :
A fixed-point iteration scheme for sensitivity-based distributed optimal control
In: IEEE Transactions on Automatic Control 70 (2025), p. 2778-2785
ISSN: 1558-2523
DOI: 10.1109/TAC.2024.3505753 - , , :
Asynchronous sensitivity-based distributed optimal control for nonlinear systems
2025 American Control Conference (ACC) (Denver, CO (USA), 8. July 2025 - 10. July 2025)
In: Proceedings 2025 American Control Conference (ACC) 2025 - , , :
Sensitivity-Based Distributed Model Predictive Control for Nonlinear Systems under Inexact Optimization
In: Optimal Control Applications & Methods 46 (2025), p. 1538-1558
ISSN: 0143-2087
DOI: 10.1002/oca.3277 - , , , :
Dynamic Compensation of the Threading Speed Drop in Rolling Processes: Bayesian Optimization of the Roughing and Finishing Mill
In: Journal of Process Control 156 (2025), p. 103579
ISSN: 0959-1524
DOI: 10.1016/j.jprocont.2025.103579 - , , , :
Why engineers should care about semi-infinite programming: Nominal versus tolerance-aware geometry optimization of a proportional electromagnetic actuator
10th IFAC Symposium on Mechatronic Systems & 14th Symposium on Robotics (MSROB 2025) (Paris (France), 15. July 2025 - 18. July 2025)
In: Proceedings 10th IFAC Symposium on Mechatronic Systems & 14th Symposium on Robotics (MSROB 2025) 2025 - , , , , , , , :
Closed-loop control of a liquid-liquid mixer using MPC and GPR-models
33rd Mediterranean Conference on Control and Automation (MED 2025) (Tangier, Morocco, 11. June 2025 - 13. June 2025)
In: Proceedings 33rd Mediterranean Conference on Control and Automation (MED 2025) 2025
- , , , , :
Control approaches for operating point stabilization of microring resonator modulators under fast perturbations
Silicon Photonics XIX
In: Graham T. Reed, Andrew P. Knights (ed.): Proceedings Silicon Photonics XIX 2024
DOI: 10.1117/12.3000834 - , :
A sensitivity-based approach to self-triggered nonlinear model predictive control
In: IEEE Access 12 (2024), p. 153243-153252
ISSN: 2169-3536
DOI: 10.1109/ACCESS.2024.3480522 - , , :
Ein Konzept zum automatisierten Rangieren von Fahrzeugen mit Anhängern
In: At-Automatisierungstechnik 72 (2024), p. 354-368
ISSN: 0178-2312
DOI: 10.1515/auto-2023-0198 - , , , :
Local predictive optimization of globally planned motions for truck-trailer systems
In: IEEE Transactions on Control Systems Technology 32 (2024), p. 1555-1568
ISSN: 1063-6536
DOI: 10.1109/TCST.2023.3345169 - , , :
Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2024 (Abu Dhabi, 14. October 2024 - 18. October 2024)
In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
DOI: 10.1109/IROS58592.2024.10802342 - , , :
Trajectory tracking control for multilevel pressure boosting systems
28th International Conference on System Theory, Control and Computing (ICSTCC) (Sinaia, Romania, 10. October 2024 - 12. October 2024) - , , , , :
Fault detection in gauge-sensorized strain wave gears
European Control Conference (Stockholm (Sweden), 25. June 2024 - 28. June 2024)
DOI: 10.23919/ECC64448.2024.10591216 - , , , :
Model predictive path-following control for truck–trailer systems with specific guidance points - Design and experimental validation
In: Mechatronics 100 (2024), p. 103190
ISSN: 0957-4158
DOI: 10.1016/j.mechatronics.2024.103190 - , , , , , :
Work Roll Speed Drop Compensation for Hot Strip Mills Reduces Drivetrain Wear and Increases Strip Quality
AISTech 2024 Iron and Steel Technology Conference (Columbus, OH, 6. May 2024 - 9. May 2024)
In: AISTech 2024 — Proceedings of the Iron & Steel Technology Conference, Warrendale, PA: 2024
DOI: 10.33313/388/128 - , , , , :
Distributed Stochastic Optimal Control of Nonlinear Systems based on ADMM
In: IEEE Control Systems Letters 8 (2024), p. 424-429
ISSN: 2475-1456
DOI: 10.1109/LCSYS.2024.3393411 - , , :
Sensitivity-Based Distributed Model Predictive Control: Synchronous and Asynchronous Execution Compared to ADMM
In: At-Automatisierungstechnik 72 (2024), p. 91-106
ISSN: 0178-2312
DOI: 10.1515/auto-2023-0050 - , , :
Asynchronous ADMM for Nonlinear Continuous-Time Systems
In: Optimal Control Applications & Methods (2024)
ISSN: 0143-2087 - , , :
Optimal dynamic current control for externally excited synchronous machines
2024 IEEE Conference on Control Technology and Applications (CCTA) (Newcastle upon Tyne, UK, 21. August 2024 - 23. August 2024)
DOI: 10.1109/CCTA60707.2024.10666513 - , , , , :
Dynamic compensation of the threading speed drop in rolling processes
In: Journal of Process Control 137 (2024), p. 103197
ISSN: 0959-1524
DOI: 10.1016/j.jprocont.2024.103197 - , , , :
GP-based modeling for PSD control of emulsification processes
28th International Conference on System Theory, Control and Computing (ICSTCC) (Sinaia, Romania, 10. October 2024 - 12. October 2024)
- , , :
Cooperative dual-arm control for heavy object manipulation based on hierarchical quadratic programming
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Detroit, 1. October 2023 - 5. October 2023) - , , :
Model predictive interaction control for robotic manipulation tasks
In: IEEE Transactions on Robotics 39 (2023), p. 76-89
ISSN: 1552-3098
DOI: 10.1109/TRO.2022.3196607 - , , , :
Hierarchical model predictive control for an off-highway Diesel engine with SCR catalyst
In: International Journal of Engine Research (2023)
ISSN: 1468-0874
DOI: 10.1177/14680874221143600 - , , , , :
Simulation chain for sensorized strain wave gears
27th International Conference on System Theory, Control and Computing (ICSTCC) (Timisoara (Romania), 11. October 2023 - 13. October 2023)
In: Proc. 27th International Conference on System Theory, Control and Computing (ICSTCC) 2023
DOI: 10.1109/ICSTCC59206.2023.10308501 - , , , , , :
Probabilistic prediction methods for nonlinear systems with application to stochastic model predictive control
In: Annual Reviews in Control 56 (2023), p. 100905
ISSN: 1367-5788
DOI: 10.1016/j.arcontrol.2023.100905 - , :
Performance prediction of NMPC algorithms with incomplete optimization
22nd IFAC World Congress (Yokohama, Japan, 9. July 2023 - 14. July 2023)
In: Proc. 22nd IFAC World Congress (accepted) 2023
- , , :
A modular framework for distributed model predictive control of nonlinear continuous-time systems (GRAMPC-D)
In: Optimization and Engineering 23 (2022), p. 771-795
ISSN: 1389-4420
DOI: 10.1007/s11081-021-09605-3 - , , :
Improving the performance of distributed model predictive control by applying graph partitioning methods
26th International Conference on System Theory, Control and Computing (ICSTCC) (Sinaia (Romania), 19. October 2022 - 21. October 2022)
DOI: 10.1109/icstcc55426.2022.9931785 - , , , :
A Numerical Approach for Solving the Inversion Problem for n-Trailer Systems
2022 American Control Conference, ACC 2022 (Atlanta, GA, 8. June 2022 - 10. June 2022)
In: 2022 American Control Conference (ACC) 2022
DOI: 10.23919/ACC53348.2022.9867593 - , , , :
Trajectory optimization for truck-trailer systems based on predictive path-following control
6th IEEE Conference on Control Technology and Applications (CCTA) (Trieste (Italy), 22. August 2022 - 25. August 2022)
DOI: 10.1109/ccta49430.2022.9966073 - , , , :
Catching objects with a robot arm using model predictive control
In: Proceedings 2022 American Control Conference (ACC) 2022
DOI: 10.23919/acc53348.2022.9867380 - , , :
Comparison of sensitivity-based and ADMM-based DMPC applied to building automation
6th IEEE Conference on Control Technology and Applications (CCTA) (Trieste (Italy), 22. August 2022 - 25. August 2022)
DOI: 10.1109/ccta49430.2022.9966164 - , , , , :
Circulating current control and energy balancing of a modular multilevel converter using model predictive control for HVDC applications
48th Annual Conference of the IEEE Industrial Electronics Society (IECON 2022) (Brussels (BE), 17. October 2022 - 20. October 2022)
DOI: 10.1109/iecon49645.2022.9968973 - , , , , :
Online Model Predictive Motion Cueing With Real-Time Driver Prediction
In: IEEE Transactions on Intelligent Transportation Systems 23 (2022), p. 12414-12428
ISSN: 1524-9050
DOI: 10.1109/tits.2021.3114003 - , , :
Nonlinear model predictive control with latent force models
In: Proceedings 2022 American Control Conference (ACC) 2022
DOI: 10.23919/acc53348.2022.9867650 - , , , , :
Hierarchical learning for model predictive collision avoidance
10th Vienna International Conference on Mathematical Modelling (MATHMOD 22) (Vienna (Austria), 27. July 2022 - 29. July 2022)
In: IFAC PapersOnLine 2022
DOI: 10.1016/j.ifacol.2022.09.121 - , , :
Optimal current setpoint computation for externally excited synchronous machines
6th IEEE Conference on Control Technology and Applications (CCTA) (6th IEEE Conference on Control Technology and Applications (CCTA), 22. August 2022 - 25. August 2022)
DOI: 10.1109/ccta49430.2022.9965988 - , , , , , , :
FOV-based model predictive object tracking for quadcopters
9th IFAC Symposium on Mechatronic Systems (Mechatronics 2022) (Los Angeles, CA (USA), 6. September 2022 - 9. September 2022)
DOI: 10.1016/j.ifacol.2022.10.481 - , , :
Semi-infinite programming using Gaussian process regression for robust design optimization
In: Proceedings European Control Conference 2022
DOI: 10.23919/ecc55457.2022.9838137
- , , :
Experimental validation of the open-source DMPC framework GRAMPC-D applied to the remote-accessible robotarium
IEEE International Conference on Mechatronics and Automation (ICMA) (, 8. August 2021 - 11. May 2021)
DOI: 10.1109/icma52036.2021.9512773 - , , :
Towards asynchronous ADMM for distributed model predictive control of nonlinear systems
In: Proceedings European Control Conference (ECC 2021) 2021
DOI: 10.23919/ecc54610.2021.9654943 - , , , :
Model predictive interaction control for force closure grasping
2021 IEEE Conference on Decision and Control (CDC) (Austin, TX, USA, 14. December 2021 - 17. December 2021)
DOI: 10.1109/cdc45484.2021.9683405 - , :
A sensitivity-based distributed model predictive control algorithm for nonlinear continuous-time systems
In: 5th IEEE Conference on Control Technology and Applications (CCTA) 2021
DOI: 10.1109/ccta48906.2021.9658733 - , , :
Learning-based driver prediction for MPC-based motion cueing algorithms
In: Driving Simulation Conference Europe 2021 (DSC) 2021 - , , , :
Potential der modellprädiktiven Regelung für Fahrsimulatoren
In: At-Automatisierungstechnik 69 (2021), p. 155-170
ISSN: 0178-2312
DOI: 10.1515/auto-2020-0090 - , , , :
Model predictive path-following control for general n-trailer systems with an arbitrary guidance point
In: Proceedings European Control Conference (ECC 2021) 2021
DOI: 10.23919/ecc54610.2021.9654870 - , :
Gradient-based nonlinear model predictive control for systems with state-dependent mass matrix
2021 IEEE Conference on Decision and Control (CDC), accepted
DOI: 10.1109/cdc45484.2021.9683175
- , , :
Distributed optimization with ALADIN for non-convex optimal control problems
In: 59th IEEE Conference on Decision and Control (CDC 2020) 2020
DOI: 10.1109/cdc42340.2020.9304459 - , , :
Neighbor approximations for distributed optimal control of nonlinear networked systems
European Control Conference (ECC 2020)
DOI: 10.23919/ecc51009.2020.9143752 - , :
Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications
In: Control Engineering Practice 99 (2020), Article No.: 104415
ISSN: 0967-0661
DOI: 10.1016/j.conengprac.2020.104415 - , , , , :
Towards a Generic Manipulation Framework for Robots based on Model Predictive Interaction Control
IEEE International Conference on Mechatronics and Automation (ICMA) (Beijing, 13. October 2020 - 16. October 2020)
DOI: 10.1109/icma49215.2020.9233628 - , , :
Model Predictive Interaction Control for Industrial Robots
21st IFAC World Congress (Berlin, 12. July 2020 - 17. July 2020)
DOI: 10.1016/j.ifacol.2020.12.2696 - , , :
Model Predictive Position and Force Trajectory Tracking Control for Robot-Environment Interaction
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Las Vegas, NV, USA, 25. October 2020 - 29. October 2020)
DOI: 10.1109/iros45743.2020.9341168 - , :
Moving horizon estimation for continuous glucose monitoring
7th International Conference on Biomedical Engineering and Systems (ICBES 20)
DOI: 10.11159/icbes20.119 - , , , :
Optimization of direct winding processes based on a holistic control approach
Electric Drives Production Conference (E-DPC) (Ludwigsburg (D), 8. December 2020 - 9. December 2020)
DOI: 10.1109/edpc51184.2020.9388184 - , , , :
Model predictive control for agricultural machines with implements
In: Proceedings 28th Mediterranean Conference on Control and Automation (MED) 2020
DOI: 10.1109/med48518.2020.9183272