Robotics deals in general with machines that can assist in or perform the execution of tasks such as assembly or machining by industrial robots. Research projects in this area concern, for example, the control of motions and forces in human-robot interaction as well as the planning of paths and trajectories for mobile and collaborative robots.
Robots should move and interact with humans as efficiently as possible. If this includes high velocities or heavy payloads, the nonlinear rigid body dynamics as well as the input constraints need to be taken into account, which leads to a computationally demanding optimization problem. On the other hand, when the robot is in contact with its environment, the rigid body dynamics are often less relevant, but the forces and torques that arise must be considered by the control system. This is especially important for safe human-robot interaction. Here, the challenges include the contact modelling (e.g. stiffness and friction), the safe handling of contact loss, or the selection of controller parameters for different applications. Current research considers model predictive interaction control (MPIC), which refers to MPC with explicit prediction of contact forces and torques, as well as the development of specialized algorithms for solving optimization problems with rigid body dynamics.


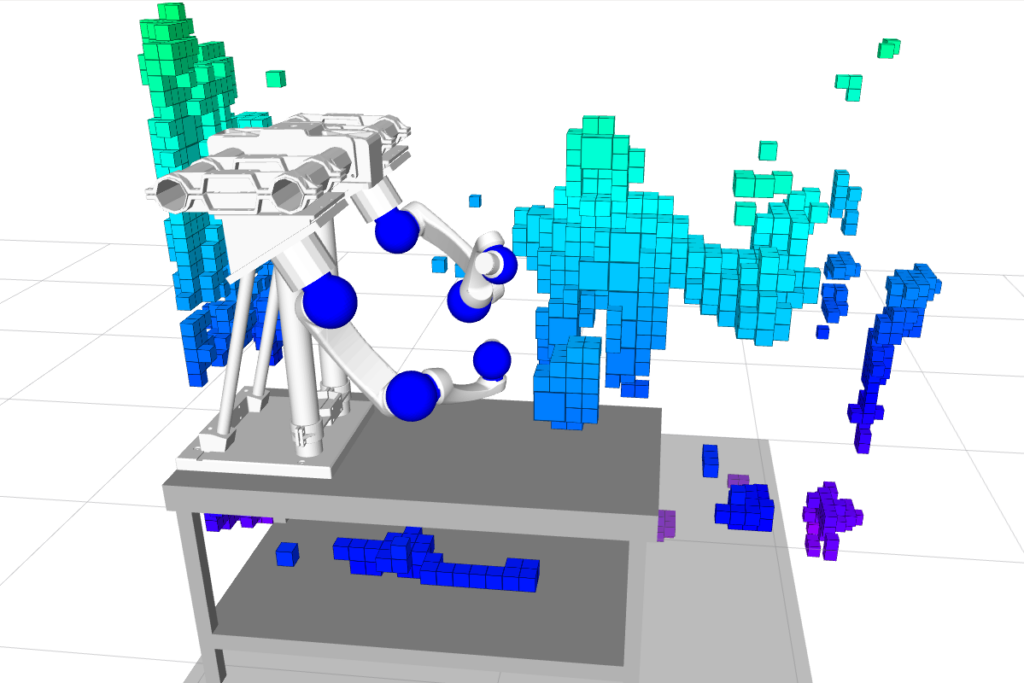
Besides controlling motions, also the planning of paths (geometric description) and trajectories (time information) is a relevant problem for many types of robots. In particular for mobile and collaborative robots, motions should be planned in such a way that they do not cause self-collisions or collisions with obstacles in the environment. Global planners iteratively build a search structure that explores the space of possible motions, whereas local planners only search in the neighborhood of an initial solution. In order to efficiently find high-quality solutions, it is necessary to combine the advantages of both global and local planning methods. Further difficulties arise in dynamic environments, where the future motion of obstacles needs to be predicted or for car-like robots, where the non-holonomic kinematics need to be considered.


The Chair is equipped with a mobile dual-arm robot as well as a motion capturing system that have been funded by the German Research Foundation (Deutsche Forschungsgemeinschaft, DFG) through the major instrumentation proposal INST 90/1167-1 FUGG. The system enables the experimental validation of planning and control methods for mobile manipulation in workspaces shared with humans. For more information contact Prof. Dr.-Ing. Knut Graichen or Dr.-Ing. Andreas Völz.
Videos
Related projects since 2021
Funding source: Deutsche Forschungsgemeinschaft (DFG)
Project leader:

Prof. Dr.-Ing. Knut Graichen
Chair holder
Precise interactions as part of industrial manufacturing tasks are typically very complex to characterize and implement. One reason for this is the heterogeneity of the task-specific requirements for the motion and control behavior. A direct implementation of the task into a robot program therefore requires highly qualified specialists and is only profitable for large lot sizes. For a flexible applicability and easy (re-)configuration of the robot system, an approach to programming by kinestheti…
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)
Project leader:

Dr.-Ing. Andreas Völz
Senior Lecturer
Dual-armrobots offer a high potential for automation technology, as they canbe used to implement tasks that are not possible with one arm alone.This includes in particular the manipulation of large or heavyobjects that exceed the payload of a single arm. Illustrativeexamples are the movement of beverage crates, long boards or pipes,which are also preferably grasped by humans with both hands.However,cooperative manipulation is particularly challenging, because botharms and the grasped object form…
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)
Acronym: KARMA
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Acronym: AMOR
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)
Project leader: ,
Prof. Dr.-Ing. Knut Graichen
Chair holder
Robotic hands are often motivated by the fact that they can be used to perform a wide range of manipulation tasks. The extension to a robotic hand-arm system (e.g., as part of a humanoid robot) makes it possible to significantly reduce the workload of people in shared workspaces. Clear examples of this can be found both in industrial manufacturing processes (pick and place, assembly, machining, etc.) and in everyday human life (opening doors, cutting food, handling objects, etc.). In addition to…
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications since 2020
- , :
Towards Simulation-Based Motion Planning for Deformable Linear Objects
23rd IFAC World Congress (Busan (Korea), 23. August 2026 - 28. August 2026)
- , , , , :
Time-Optimal Path Parameterization with Viscous Friction and Jerk Constraints based on Reachability Analysis
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Hangzhou, 19. October 2025 - 25. October 2025)
In: Proceedings 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 - , , , :
Fault Handling in Robotic Manipulation Tasks for Model Predictive Interaction Control
In: IEEE Robotics and Automation Letters 10 (2025), p. 9002-9009
ISSN: 2377-3766
DOI: 10.1109/LRA.2025.3592069 - , , , , :
Estimation of input rotation speed in gauge-sensorized strain wave gears
2025 IEEE Conference on Control Technology and Applications (CCTA) (San Diego (USA), 25. August 2025 - 27. August 2025)
DOI: 10.1109/CCTA53793.2025.11151315 - , , , , :
Model-based fault simulation and detection for gauge-sensorized strain wave gears
11th Vienna International Conference on Mathematical Modelling (MATHMOD 25) (Vienna (Austria), 19. February 2025 - 21. February 2025)
In: IFAC PapersOnline 2025
DOI: 10.1016/j.ifacol.2025.03.047 - , , :
Cable Manipulation for Contact Shaping Tasks using Elastic Rods
IEEE International Conference on Advanced Robotics and Mechatronics (ICARM) (Portsmouth, 1. August 2025 - 3. August 2025) - , , :
A Model Predictive Control Approach to Trajectory Tracking with Human-Robot Collision Avoidance
2025 IEEE Conference on Control Technology and Applications (CCTA) (San Diego, 25. August 2025 - 27. August 2025)
In: Proceedings 9th IEEE Conference on Control Technology and Applications (CCTA) 2025
- , , :
Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2024 (Abu Dhabi, 14. October 2024 - 18. October 2024)
In: 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2024
DOI: 10.1109/IROS58592.2024.10802342 - , , , :
DMP-based path planning for model predictive interaction control
European Control Conference (Stockholm (Sweden), 25. June 2024 - 28. June 2024) - , , :
A Programming by Demonstration Approach for Robotic Manipulation with Model Predictive Interaction Control
2024 IEEE Conference on Control Technology and Applications (CCTA) (Newcastle upon Tyne, United Kingdom, 21. August 2024 - 23. August 2024)
- , , :
Cooperative dual-arm control for heavy object manipulation based on hierarchical quadratic programming
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Detroit, 1. October 2023 - 5. October 2023) - , , :
Model predictive interaction control for robotic manipulation tasks
In: IEEE Transactions on Robotics 39 (2023), p. 76-89
ISSN: 1552-3098
DOI: 10.1109/TRO.2022.3196607 - , , , , :
In-Hand Manipulation with Synergistic Actuated Robotic Hands: An MPC-Based Approach
22nd IEEE-RAS International Conference on Humanoid Robots, Humanoids 2023 (Austin, TX, 12. December 2023 - 14. December 2023)
In: 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids) 2023
DOI: 10.1109/Humanoids57100.2023.10374563
- , , , :
Catching objects with a robot arm using model predictive control
In: Proceedings 2022 American Control Conference (ACC) 2022
DOI: 10.23919/acc53348.2022.9867380 - , , , :
Model predictive interaction control based on a path-following formulation
In: Proceedings IEEE International Conference on Mechatronics and Automation (ICMA) 2022
DOI: 10.1109/icma54519.2022.9856004 - , , , , :
Online Model Predictive Motion Cueing With Real-Time Driver Prediction
In: IEEE Transactions on Intelligent Transportation Systems 23 (2022), p. 12414-12428
ISSN: 1524-9050
DOI: 10.1109/tits.2021.3114003 - , , , , , , :
FOV-based model predictive object tracking for quadcopters
9th IFAC Symposium on Mechatronic Systems (Mechatronics 2022) (Los Angeles, CA (USA), 6. September 2022 - 9. September 2022)
DOI: 10.1016/j.ifacol.2022.10.481
- , , :
Experimental validation of the open-source DMPC framework GRAMPC-D applied to the remote-accessible robotarium
IEEE International Conference on Mechatronics and Automation (ICMA) (, 8. August 2021 - 11. May 2021)
DOI: 10.1109/icma52036.2021.9512773 - , , , :
Model predictive interaction control for force closure grasping
2021 IEEE Conference on Decision and Control (CDC) (Austin, TX, USA, 14. December 2021 - 17. December 2021)
DOI: 10.1109/cdc45484.2021.9683405 - , , :
Learning-based driver prediction for MPC-based motion cueing algorithms
In: Driving Simulation Conference Europe 2021 (DSC) 2021 - , , , :
Potential der modellprädiktiven Regelung für Fahrsimulatoren
In: At-Automatisierungstechnik 69 (2021), p. 155-170
ISSN: 0178-2312
DOI: 10.1515/auto-2020-0090 - , :
Gradient-based nonlinear model predictive control for systems with state-dependent mass matrix
2021 IEEE Conference on Decision and Control (CDC), accepted
DOI: 10.1109/cdc45484.2021.9683175
- , , , , :
Towards a Generic Manipulation Framework for Robots based on Model Predictive Interaction Control
IEEE International Conference on Mechatronics and Automation (ICMA) (Beijing, 13. October 2020 - 16. October 2020)
DOI: 10.1109/icma49215.2020.9233628 - , , :
Model Predictive Interaction Control for Industrial Robots
21st IFAC World Congress (Berlin, 12. July 2020 - 17. July 2020)
DOI: 10.1016/j.ifacol.2020.12.2696 - , , :
Model Predictive Position and Force Trajectory Tracking Control for Robot-Environment Interaction
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Las Vegas, NV, USA, 25. October 2020 - 29. October 2020)
DOI: 10.1109/iros45743.2020.9341168 - , :
Prädiktive Pfadfolgeregelung für die kollisionsfreie Bewegungsplanung von Robotern
In: At-Automatisierungstechnik 68 (2020), p. 557-570
ISSN: 0178-2312
DOI: 10.1515/auto-2020-0048