Index
Energy Solutions

The energy-efficient operation of technical systems is of increasing importance in view of global warming and the transition to renewable energies. Control systems engineering has a high potential to contribute to the efficient use of energy, for example, regarding energy consumption of buildings, energy conversion and storage, as well as power grids. Our research in terms of optimization and learning-based control methods forms the ideal basis to develop sustainable solutions in energy-related applications.
The efficient and sustainable use of energy is one of the grand challenges today. Control engineering is a key technology to accomplish this goal by providing tailored automation solutions. For instance, heating, ventilation and air conditioning (HVAC) systems in residential and non-residential buildings belong to the largest energy consumers. Advanced control schemes can help to efficiently control HVAC systems while learning the building characteristics like thermal dynamics or room occupancy patterns and considering stochastic weather forecasts to reduce the energy consumption in a predictive manner.
Another example are electrical grids that connect energy sources (power plants, wind turbines, etc.) and energy sinks (e.g. factories, households). On the lower level, each involved component, e.g. drives and inverters, can be designed to reduce undesired power dissipation. On the higher level, the energy distribution itself can be optimized using, for instance, distributed model predictive control for smart grids.
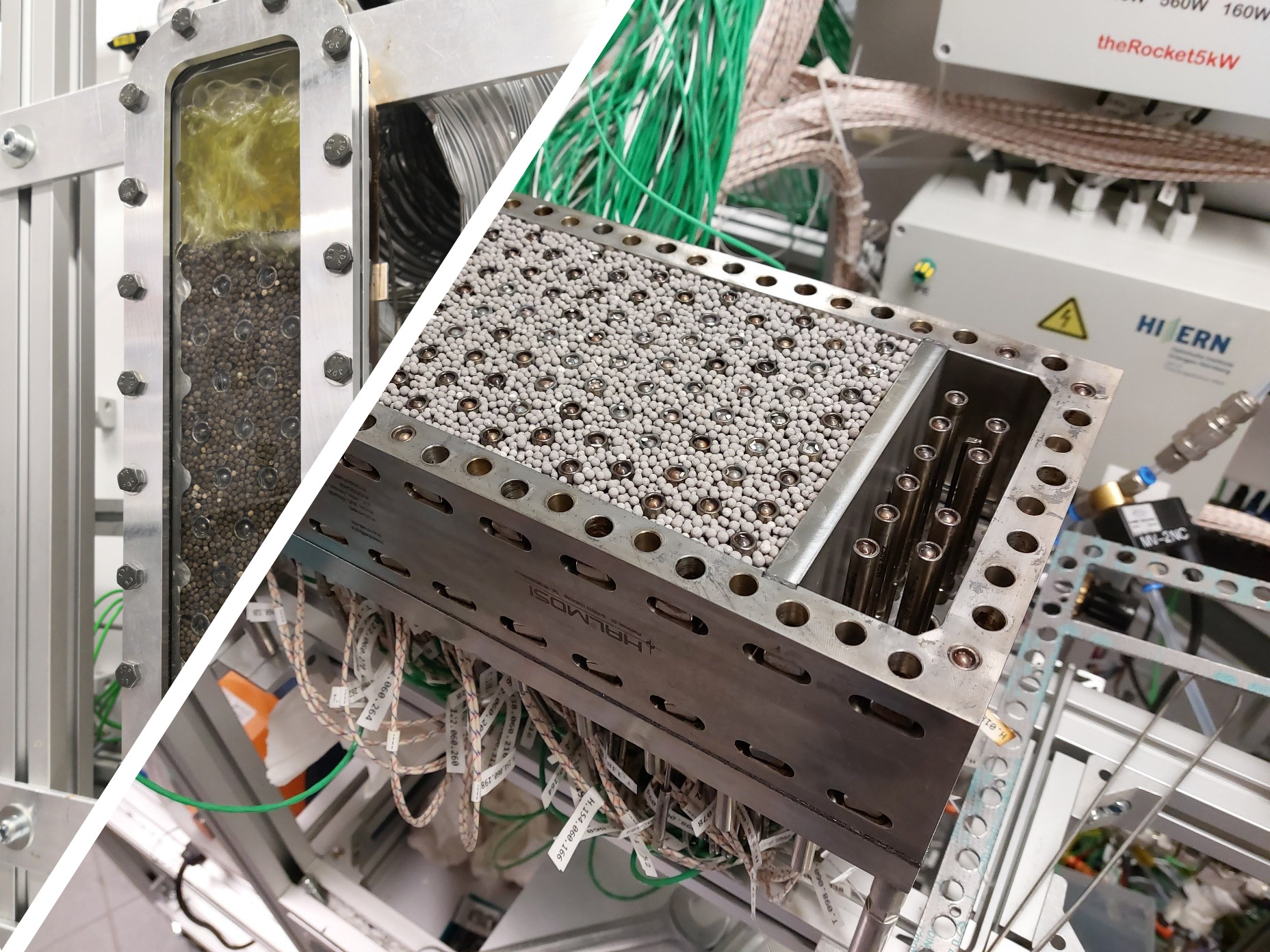
Despite the current prevalence of batteries as mobile energy storages, hydrogen-based fuel cells are a promising alternative for applications with high energy demand as, for example, trains or ships. One option to solve the problem of save hydrogen storage is the use of liquid organic hydrogen carriers (LOHC), either as storage/transport medium or for direct fuel cell usage. The de-/hydrogenation of LOHC is a complex process that offers high potential for improvement by modern control methods.

Related projects since 2021
Funding source: Industrie
Project leader:

Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
To achieve climate targets, CO2 emissions in the building sector have to be significantly reduced. However, the integration of renewable energy sources increases the complexity of building energy systems and thus the requirements for the operation strategy. Model-based and predictive controllers are necessary for efficient operation. However, due to the high complexity of the energy systems, the development, implementation, and commissioning are very complex leading to high costs, which is why model…
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Helmholtz-Gemeinschaft
Project leader: ,
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications
- Kowalewski J, Lorenz A, Thomas F, Valenzuela RAA, Graichen K (2025). Passivity-Based Robust Stability Analysis of the Converter–Grid Interaction and Passivity-Shaping Controller Design. IET Generation Transmission & Distribution, 19(1). [DOI].
- Landgraf D, Wietzke T, Graichen K (2025). Stochastic model predictive control with switched latent force models. In European Control Conference (pp. 101311). European Journal of Control, 85, 101311. [DOI].
- Schumann M, Ebersberger S, Graichen K (2023). Online learning and adaptation of nonlinear thermal networks for power inverters. In 49th Annual Conference of the IEEE Industrial Electronics Society (IECON 2023).
- Schumann M, Ebersberger S, Graichen K (2023). Improved nonlinear estimation in thermal networks using machine learning. In IEEE International Conference on Mechatronics (ICM 2023). [DOI].
- Verhoolen A, Geißelbrecht M, Kadar J, Preuster P, Wasserscheid P, Graichen K (2024). Bayesian optimization of operating points of a continuous perhydro-dibenzyltoluene dehydrogenation reactor. International Journal of Energy Research. [DOI].
- Wietzke T, Gall J, Graichen K (2024). Occupancy Prediction for Building Energy Systems with Latent Force Models. Energy and Buildings, pp. 113968. [DOI].
- Wietzke T, Graichen K (2025). Physics-informed sparse Gaussian processes for model predictive control in building energy systems. In 11th Vienna International Conference on Mathematical Modelling (MATHMOD 25) (pp. 43-48). [DOI].
- Wietzke T, Landgraf D, Graichen K (2025). Application of stochastic model predictive control for building energy systems using latent force models. At-Automatisierungstechnik, 73(6), 441-450. [DOI].
- Huber H, Burk D, Graichen K (2022). Comparison of sensitivity-based and ADMM-based DMPC applied to building automation. In 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 546-553). [DOI].
- Kowalewski J, Lorenz A, Lomakin A, Alvarez R, Graichen K (2022). Circulating current control and energy balancing of a modular multilevel converter using model predictive control for HVDC applications. In 48th Annual Conference of the IEEE Industrial Electronics Society (IECON 2022). [DOI].
- Schumann M, Ebersberger S, Graichen K (2022). Dynamic and stationary state estimation of fluid cooled three-phase inverters. In 26th IEEE International Symposium on Power Electronics, Electrical Drives Automation and Motion (SPEEDAM 2022). [DOI].
- Huber H, Graichen K (2021). A sensitivity-based distributed model predictive control algorithm for nonlinear continuous-time systems. In 5th IEEE Conference on Control Technology and Applications (CCTA) (pp. (accepted)). [DOI].
Learning in Control
Algorithms of artificial intelligence and machine learning are of increasing importance for control applications. Our research and expertise in this domain ranges from the modeling of unknown or uncertain dynamics over iterative and reinforcement learning to Bayesian optimization.
One research focus at the Chair is on learning in model design and identification. Hybrid and data-driven models are attractive if physical modeling is either poor or requires high effort. Practical applications often require an online adaptation of these models in order to reflect effects of aging or wear or to increase the model accuracy in different operation regimes. Information about the reliability and trustworthiness of a learned model can directly be used within the control design. For instance, the prediction of the uncertainty allows to satisfy constraints with a given probability. A challenge with learning-based methods is to ensure real-time feasibility with possibly weak hardware resources in order to bring these advanced learning in control methods into practice.
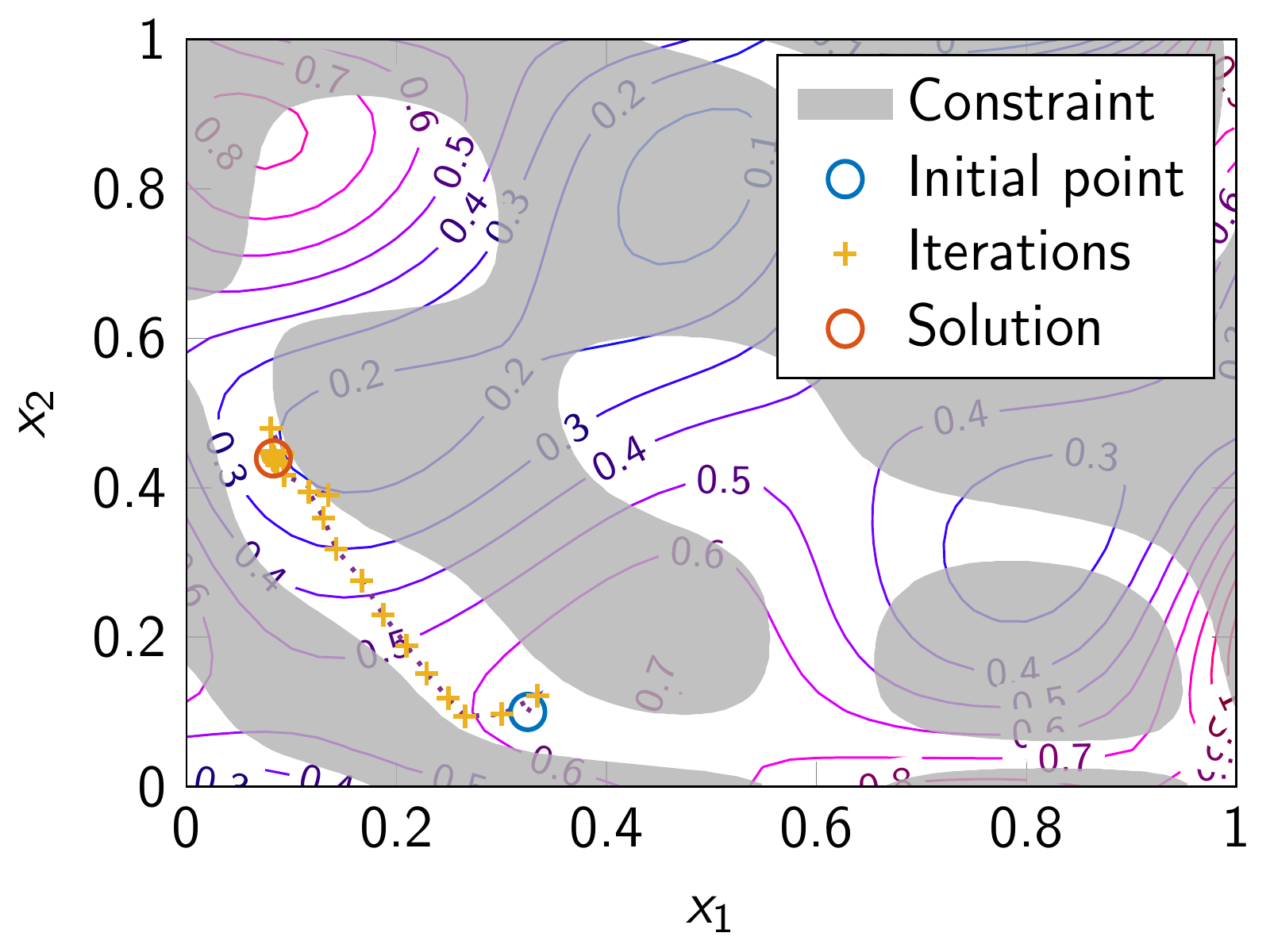
Another field of research and expertise is learning in optimization and control, for instance, reinforcement learning and Bayesian optimization. Reinforcement learning aims at obtaining an optimal control strategy from repeated interactions with the system. Formulating this task as an optimization problem shows the conceptual similarity to model predictive control, with the difference that reinforcement learning does not require model knowledge of the system. In a similar spirit, Bayesian optimization allows to solve complex optimization problem, in particular if the cost function or constraints are not analytically known or can only be evaluated by costly numerical simulations. Many technical tasks such as the optimization of production processes, an optimal product design or the search of optimal controller setpoints can be formulated as (partially) unknown optimization problem, illustrating the generality and importance of Bayesian optimization.
Related projects since 2021
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Deutsche Forschungsgemeinschaft (DFG)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Precise interactions as part of industrial manufacturing tasks are typically very complex to characterize and implement. One reason for this is the heterogeneity of the task-specific requirements for the motion and control behavior. A direct implementation of the task into a robot program therefore requires highly qualified specialists and is only profitable for large lot sizes. For a flexible applicability and easy (re-)configuration of the robot system, an approach to programming by kinesthetic…
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
To achieve climate targets, CO2 emissions in the building sector have to be significantly reduced. However, the integration of renewable energy sources increases the complexity of building energy systems and thus the requirements for the operation strategy. Model-based and predictive controllers are necessary for efficient operation. However, due to the high complexity of the energy systems, the development, implementation, and commissioning are very complex leading to high costs, which is why model…
Funding source: Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications
- Conrad P, Graichen K (2024). A sensitivity-based approach to self-triggered nonlinear model predictive control. IEEE Access, 12, 153243-153252. [DOI].
- Conrad P, Steuter L, Pierer von Esch M, Beck J, Graichen K (2025). Aerodynamic neural network modeling for gradient-based model predictive flight control. In 33rd Mediterranean Conference on Control and Automation (MED 2025).
- Dio M, Demir O, Trachte A, Graichen K (2023). Safe active learning and probabilistic design of experiment for autonomous hydraulic excavators. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 9685-9690).
- Goller T, Brohm D, Völz A, Graichen K (2024). DMP-based path planning for model predictive interaction control. In European Control Conference (pp. 128-133).
- Goller T, Hopf V, Völz A, Graichen K (2025). Fault Handling in Robotic Manipulation Tasks for Model Predictive Interaction Control. IEEE Robotics and Automation Letters, 10(9), 9002 – 9009. [DOI].
- Goller T, Völz A, Graichen K (2024). A Programming by Demonstration Approach for Robotic Manipulation with Model Predictive Interaction Control. In 2024 IEEE Conference on Control Technology and Applications (CCTA) (pp. 799-804).
- Hartmann P, Graichen K (2025). Learning-based uncertainty-aware predictive control of truck-trailer systems in rough terrain. In 19th IEEE International Conference on Control & Automation (ICCA).
- Hoffmann M, Braun S, Sura O, Stelzig M, Schüßler C, Graichen K, Vossiek M (2023). Concept for an Automatic Annotation of Automotive Radar Data Using AI-segmented Aerial Camera Images. In 2023 IEEE International Radar Conference, RADAR 2023. [DOI].
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2025). Estimation of input rotation speed in gauge-sensorized strain wave gears. In 2025 IEEE Conference on Control Technology and Applications (CCTA).
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2024). Fault detection in gauge-sensorized strain wave gears. In European Control Conference (pp. 26-33). [DOI].
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2025). Model-based fault simulation and detection for gauge-sensorized strain wave gears. In 11th Vienna International Conference on Mathematical Modelling (MATHMOD 25) (pp. 271 – 276). [DOI].
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2023). Simulation chain for sensorized strain wave gears. In 27th International Conference on System Theory, Control and Computing (ICSTCC) (pp. 467 – 473). [DOI].
- Landgraf D, Völz A, Berkel F, Schmidt K, Specker T, Graichen K (2023). Probabilistic prediction methods for nonlinear systems with application to stochastic model predictive control. Annual Reviews in Control, 56, 100905. [DOI].
- Landgraf D, Völz A, Graichen K (2025). A software framework for stochastic model predictive control of nonlinear continuous-time systems (GRAMPC-S). Optimization and Engineering. [DOI].
- Landgraf D, Wietzke T, Graichen K (2025). Stochastic model predictive control with switched latent force models. In European Control Conference (pp. 101311). European Journal of Control, 85, 101311. [DOI].
- Rabenstein G, Ullrich L, Graichen K (2024). Sampling for model predictive trajectory planning in autonomous driving using normalizing flows. In 35th IEEE Intelligent Vehicles Symposium (IEEE IV 2024) (pp. 2091-2096).
- Santer P, Völz A, Graichen K (2025). A Model Predictive Control Approach to Trajectory Tracking with Human-Robot Collision Avoidance. In 2025 IEEE Conference on Control Technology and Applications (CCTA).
- Schumann M, Ebersberger S, Graichen K (2023). Online learning and adaptation of nonlinear thermal networks for power inverters. In 49th Annual Conference of the IEEE Industrial Electronics Society (IECON 2023).
- Schumann M, Ebersberger S, Graichen K (2023). Improved nonlinear estimation in thermal networks using machine learning. In IEEE International Conference on Mechatronics (ICM 2023). [DOI].
- Schumann M, Graichen K (2024). PINN-based dynamical modeling and state estimation in power inverters. In 2024 IEEE Conference on Control Technology and Applications (CCTA).
- Snobar F, Michalka A, Horn M, Strohmeyer C, Graichen K (2023). Rack force estimation from standstill to high speeds by hybrid model design and blending. In IEEE International Conference on Mechatronics (ICM 2023). [DOI].
- Snobar F, Michalka A, Horn M, Strohmeyer C, Graichen K (2024). Sensitivity-based moving horizon estimation of road friction. In European Control Conference (pp. 718-724).
- Spenger P, Graichen K (2023). Performance prediction of NMPC algorithms with incomplete optimization. In 22nd IFAC World Congress (pp. 7456-7461).
- Stecher J, Kiltz L, Graichen K (2025). Generalized tolerance optimization for robust system design by adaptive learning of Gaussian processes. IEEE Access, (accepted).
- Ullrich L, Buchholz M, Dietmayer K, Graichen K (2024). AI safety assurance for automated vehicles: A survey on research, standardization, regulation. IEEE Transactions on Intelligent Vehicles. [DOI].
- Ullrich L, Buchholz M, Dietmayer K, Graichen K (2024). Expanding the Classical V-Model for the Development of Complex Systems Incorporating AI. IEEE Transactions on Intelligent Vehicles. [DOI].
- Ullrich L, Buchholz M, Petit J, Dietmayer K, Graichen K (2025). A Concept for Efficient Scalability of Automated Driving Allowing for Technical, Legal, Cultural, and Ethical Differences. In 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC).
- Ullrich L, McMaster A, Graichen K (2024). Transfer learning study of motion transformer based trajectory predictions. In 35th IEEE Intelligent Vehicles Symposium (IEEE IV 2024) (pp. 110-117).
- Ullrich L, Mujirishvili Z, Graichen K (2025). Enhancing system self-awareness and trust of AI: A case study in trajectory prediction and planning. In 36th IEEE Intelligent Vehicles Symposium (IEEE IV 2025).
- Ullrich L, Völz A, Graichen K (2023). Robust meta-learning of vehicle yaw rate dynamics via conditional neural processes. In 62nd IEEE Conference on Decision and Control (CDC) (pp. 322-327).
- Ullrich L, Zimmer W, Greer R, Graichen K, Knoll AC, Trivedi M (2025). A New Perspective On AI Safety Through Control Theory Methodologies. IEEE Open Journal of Intelligent Transportation Systems, 6, 938-966. [DOI].
- Wietzke T, Gall J, Graichen K (2024). Occupancy Prediction for Building Energy Systems with Latent Force Models. Energy and Buildings, pp. 113968. [DOI].
- Wietzke T, Graichen K (2025). Physics-informed sparse Gaussian processes for model predictive control in building energy systems. In 11th Vienna International Conference on Mathematical Modelling (MATHMOD 25) (pp. 43-48). [DOI].
- Wietzke T, Landgraf D, Graichen K (2025). Application of stochastic model predictive control for building energy systems using latent force models. At-Automatisierungstechnik, 73(6), 441-450. [DOI].
- Bergmann D, Harder K, Niemeyer J, Graichen K (2022). Nonlinear MPC of a Heavy-Duty Diesel Engine With Learning Gaussian Process Regression. IEEE Transactions on Control Systems Technology, 30(1), 113-129. [DOI].
- Goller T, Gold T, Völz A, Graichen K (2022). Model predictive interaction control based on a path-following formulation. In Proceedings IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 551-556). [DOI].
- Landgraf D, Völz A, Kontes G, Graichen K, Mutschler C (2022). Hierarchical learning for model predictive collision avoidance. In 10th Vienna International Conference on Mathematical Modelling (MATHMOD 22) (pp. 355-360). [DOI].
- Rabenstein G, Demir O, Trachte A, Graichen K (2022). Data-driven feed-forward control of hydraulic cylinders using Gaussian process regression for excavator assistance functions. In 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 962-969). [DOI].
- Schumann M, Ebersberger S, Graichen K (2022). Dynamic and stationary state estimation of fluid cooled three-phase inverters. In 26th IEEE International Symposium on Power Electronics, Electrical Drives Automation and Motion (SPEEDAM 2022). [DOI].
- Stecher J, Kiltz L, Graichen K (2022). Semi-infinite programming using Gaussian process regression for robust design optimization. In Proceedings European Control Conference (pp. 52-59). [DOI].
- Bergmann D, Graichen K (2020). Safe Bayesian Optimization under Unknown Constraints. In 59th IEEE Conference on Decision and Control, CDC 2020 (pp. 3592-3597). [DOI].
- Geiselhart R, Bergmann D, Niemeyer J, Remele J, Graichen K (2020). Hierarchical Predictive Control of a Combined Engine/Selective Catalytic Reduction System with Limited Model Knowledge. SAE International Journal of Engines, 13(2). [DOI].
- Geiselhart R, Bergmann D, Niemeyer J, Remele J, Graichen K (2020). Hierarchical predictive control of a combined engine/SCR system with limited model knowledge. SAE International Journal of Engines, 13(2). [DOI].
- Mesmer F, Szabo T, Graichen K (2020). Learning feedforward control of a hydraulic clutch actuation path based on policy gradients. In 59th IEEE Conference on Decision and Control (CDC 2020). [DOI].
- Bergmann D, Geiselhart R, Graichen K (2019). Modelling and control of a heavy-duty Diesel engine gas path with Gaussian process regression. In Proc. European Control Conference (ECC 2019) (pp. 1207-1213). Naples (Italy). [DOI].
- Bergmann D, Graichen K (2019). Gaußprozessregression zur Modellierung zeitvarianter Systeme. At-Automatisierungstechnik, 67(8), 637-647. [DOI].
- Mesmer F, Szabo T, Graichen K (2019). Learning methods for the feedforward control of a hydraulic clutch actuation path. In Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2019) (pp. 733-738). Hong Kong (China). [DOI].
Control & Optimization

The development of control and optimization methods for dynamical systems is the natural research focus of the Chair of Automatic Control. In particular, we focus on nonlinear and predictive control concepts as well as path/trajectory planning for dynamical systems closely related to optimization-based methods, always having an eye on the real-time and embedded realization for practical applications.
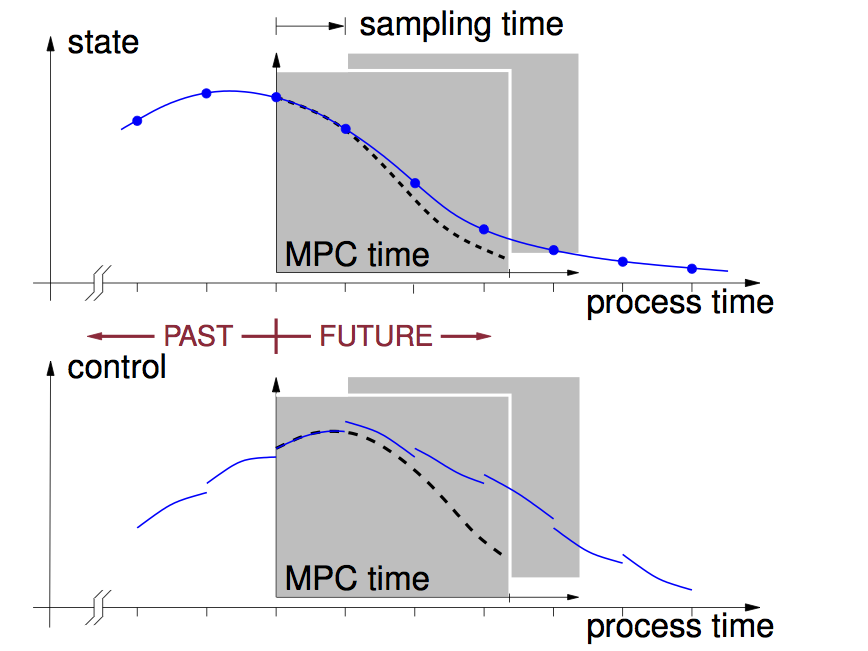
Research on nonlinear systems and control is at the heart of the Chair of Automatic Control. Modern control concepts such as model predictive control (MPC) often rely on optimization problems that have to be solved online. In particular mechatronic systems often require sampling times in the (sub-)millisecond range and therefore highly efficient control algorithms and warm-start strategies. The Chair of Automatic Control has long standing experience with the modeling of control problems of different physical domains and the development of nonlinear and predictive control concepts, always with the intention to bring these methods into practice. We also develop and maintain the open source MPC toolbox GRAMPC that was successfully used in many research and industrial projects and by other research groups. Current research concerns the extension to stochastic nonlinear systems to account for uncertainties in a consistent probabilistic setting.
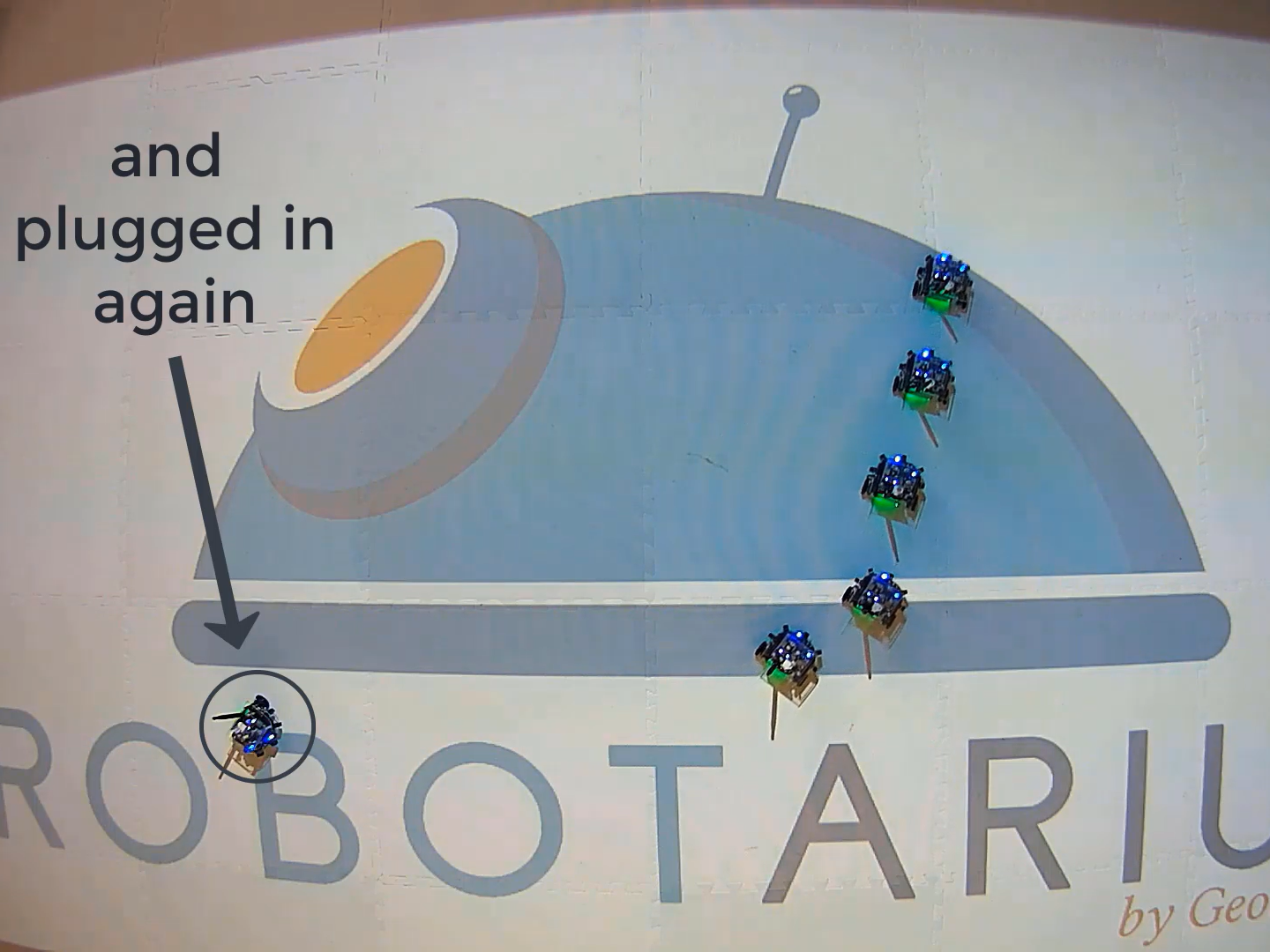
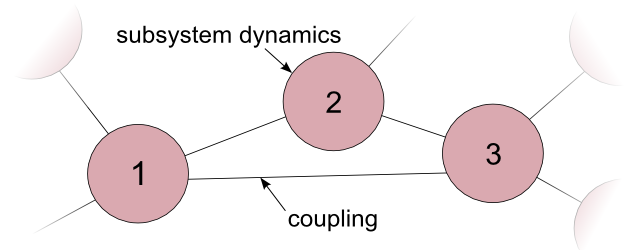
Beyond the “classical” centralized view on control applications, networked systems are of increasing importance, not only in terms of autonomous and mobile robots, distributed energy networks (smart grids), but also in connection with industry 4.0 and flexible production. The control of networked systems is challenging, because centralized approaches do not scale well with the number of subsystems and do not provide the flexibility for plug-and-play or reconfiguration scenarios. We focus on both the design of distributed (model predictive) control schemes for networked systems as well as the agent-based distributed implementation of these concepts along with suitable communication concepts to enhance the overall efficiency of networked systems. An outcome of this research is the open-source framework GRAMPC-D that implements a real-time efficient ADMM algorithm for distributed model predictive control of nonlinear networked systems including plug-and-play functionality.

Videos
Related projects since 2021
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Bayerische Forschungsstiftung
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)
Project leader:

Dr.-Ing. Andreas Völz
Senior Lecturer
Dual-armrobots offer a high potential for automation technology, as they canbe used to implement tasks that are not possible with one arm alone.This includes in particular the manipulation of large or heavyobjects that exceed the payload of a single arm. Illustrativeexamples are the movement of beverage crates, long boards or pipes,which are also preferably grasped by humans with both hands.
However,cooperative manipulation is particularly challenging, because botharms and the grasped object…
Funding source: Deutsche Forschungsgemeinschaft (DFG)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG / Schwerpunktprogramm (SPP)
Project leader: , ,
Prof. Dr.-Ing. Knut Graichen
Chair holder
The aim of this project is the automated production of liquid-liquid disperse systems via melt emulsification, whereby in this process emulsification takes place at elevated temperature. The products obtained after cooling are dispersions of spherical nanoparticles or microparticles. Within the scope of this project, a melt emulsification device for the automated production of product particles with a well-defined particle size distribution (PSD) will be further developed. The PSD has a significant influence on the subsequent product properties, such as flow behavior or drug release kinetics. The PSD of the products is determined by the complex interaction of competing mechanisms. These are, in particular, droplet breakup in a rotor-stator device as a result of shear and elongation stress, as well as coalescence and further ripening, which in turn depend on the system composition, i.e. the emulsifier used (type, concentration) and the dispersion phase (viscosity, volume fraction).
Therefore, for a better process understanding and an active process control, possibilities for in situ determination of the PSD are urgently required. In this project, a novel fiber-coupled measurement system based on broadband elastic light scattering is developed for in situ measurement of the PSD. The system will be validated on reference particle systems and applied to the emulsification process. Furthermore, a hybrid process model is developed, which is the basis for the design of a model predictive control of the process. The model predictive control in combination with the in situ measurement will provide the possibility for an active process control and the production of emulsions with predefined properties and a simultaneous optimization of the process time.
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications
- Cherian AJ, Michalka A, Murray K, Roell G, Graichen K (2024). Control approaches for operating point stabilization of microring resonator modulators under fast perturbations. In Silicon Photonics XIX (pp. 128910D). [DOI].
- Conrad P, Graichen K (2024). A sensitivity-based approach to self-triggered nonlinear model predictive control. IEEE Access, 12, 153243-153252. [DOI].
- Conrad P, Michalka A, Beck J, Graichen K (2025). Nonlinear MPC for Stabilizing the Longitudinal Dynamics of a Highly Maneuverable Aircraft. In IEEE Aerospace Conference. IEEE Aerospace Conference Proceedings.
- Conrad P, Steuter L, Pierer von Esch M, Beck J, Graichen K (2025). Aerodynamic neural network modeling for gradient-based model predictive flight control. In 33rd Mediterranean Conference on Control and Automation (MED 2025).
- Dahlmann J, Graichen K, Völz A (2024). Ein Konzept zum automatisierten Rangieren von Fahrzeugen mit Anhängern. At-Automatisierungstechnik, 72(4), 354-368. [DOI].
- Dahlmann J, Völz A, Lukassek M, Graichen K (2024). Local predictive optimization of globally planned motions for truck-trailer systems. IEEE Transactions on Control Systems Technology, 32(5), 1555-1568. [DOI].
- Dio M, Graichen K, Völz A (2024). Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2024 (pp. 3043-3048). IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3043-3048. [DOI].
- Dio M, Graichen K, Völz A (2024). Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3043-3048).
- Dio M, Völz A, Graichen K (2023). Cooperative dual-arm control for heavy object manipulation based on hierarchical quadratic programming. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 643-648).
- Dio M, Wahrburg A, Enayati N, Graichen K, Völz A (2025). Time-Optimal Path Parameterization with Viscous Friction and Jerk Constraints based on Reachability Analysis. In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
- Gold T, Völz A, Graichen K (2023). Model predictive interaction control for robotic manipulation tasks. IEEE Transactions on Robotics, 39(1), 76-89. [DOI].
- Goppelt-Schneider F, Schmidt-Vollus R, Graichen K (2024). Trajectory tracking control for multilevel pressure boosting systems. In 28th International Conference on System Theory, Control and Computing (ICSTCC).
- Harder K, Niemeyer J, Remele J, Graichen K (2023). Hierarchical model predictive control for an off-highway Diesel engine with SCR catalyst. International Journal of Engine Research. [DOI].
- Hartmann P, Graichen K (2025). Learning-based uncertainty-aware predictive control of truck-trailer systems in rough terrain. In 19th IEEE International Conference on Control & Automation (ICCA).
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2024). Fault detection in gauge-sensorized strain wave gears. In European Control Conference (pp. 26-33). [DOI].
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2023). Simulation chain for sensorized strain wave gears. In 27th International Conference on System Theory, Control and Computing (ICSTCC) (pp. 467 – 473). [DOI].
- Kowalewski J, Lorenz A, Thomas F, Valenzuela RAA, Graichen K (2025). Passivity-Based Robust Stability Analysis of the Converter–Grid Interaction and Passivity-Shaping Controller Design. IET Generation Transmission & Distribution, 19(1). [DOI].
- Kruse T, Griebel T, Graichen K (2025). Adaptive Kalman filtering: Measurement and process noise covariance estimation using Kalman smoothing. IEEE Access, 13, 11863-11875. [DOI].
- Landgraf D, Völz A, Berkel F, Schmidt K, Specker T, Graichen K (2023). Probabilistic prediction methods for nonlinear systems with application to stochastic model predictive control. Annual Reviews in Control, 56, 100905. [DOI].
- Landgraf D, Völz A, Graichen K (2025). A software framework for stochastic model predictive control of nonlinear continuous-time systems (GRAMPC-S). Optimization and Engineering. [DOI].
- Landgraf D, Wietzke T, Graichen K (2025). Stochastic model predictive control with switched latent force models. In European Control Conference (pp. 101311). European Journal of Control, 85, 101311. [DOI].
- Lukassek M, Dahlmann J, Völz A, Graichen K (2024). Model predictive path-following control for truck–trailer systems with specific guidance points – Design and experimental validation. Mechatronics, 100, 103190. [DOI].
- Löhe K, Reinhard J, Petrasch N, Kallabis S, Graichen K, Mucha M (2024). Work Roll Speed Drop Compensation for Hot Strip Mills Reduces Drivetrain Wear and Increases Strip Quality. In AISTech 2024 Iron and Steel Technology Conference (pp. 1212-1223). Warrendale, PA. [DOI].
- Pierer von Esch M, Landgraf D, Steffel M, Völz A, Graichen K (2024). Distributed stochastic optimal control of nonlinear systems based on ADMM. In 63th IEEE Conference on Decision and Control (CDC 2024).
- Pierer von Esch M, Landgraf D, Steffel M, Völz A, Graichen K (2024). Distributed Stochastic Optimal Control of Nonlinear Systems based on ADMM. IEEE Control Systems Letters, 8, 424-429. [DOI].
- Pierer von Esch M, Nistler E, Völz A, Graichen K (2025). Sensitivity-based distributed NMPC: Experimental results for a levitating planar motion system. IEEE Transactions on Control Systems Technology. [DOI].
- Pierer von Esch M, Völz A, Graichen K (2024). Sensitivity-Based Distributed Model Predictive Control: Synchronous and Asynchronous Execution Compared to ADMM. At-Automatisierungstechnik, 72(2), 91-106. [DOI].
- Pierer von Esch M, Völz A, Graichen K (2025). A fixed-point iteration scheme for sensitivity-based distributed optimal control. IEEE Transactions on Automatic Control, 70(4), 2778-2785. [DOI].
- Pierer von Esch M, Völz A, Graichen K (2024). Asynchronous ADMM for Nonlinear Continuous-Time Systems. Optimal Control Applications & Methods.
- Pierer von Esch M, Völz A, Graichen K (2025). Asynchronous sensitivity-based distributed optimal control for nonlinear systems. In 2025 American Control Conference (ACC).
- Pierer von Esch M, Völz A, Graichen K (2025). Sensitivity-Based Distributed Model Predictive Control for Nonlinear Systems under Inexact Optimization. Optimal Control Applications & Methods, (accepted).
- Pierer von Esch M, Völz A, Graichen K (2024). Sensitivity-based distributed model predictive control: synchronous and asynchronous execution compared to ADMM. At-Automatisierungstechnik, 72(2), 91-106. [DOI].
- Reinhard J, Löhe K, Graichen K (2024). Optimal dynamic current control for externally excited synchronous machines. In 2024 IEEE Conference on Control Technology and Applications (CCTA) (pp. 146-152). [DOI].
- Reinhard J, Löhe K, Petrasch N, Kallabis S, Graichen K (2024). Dynamic compensation of the threading speed drop in rolling processes. Journal of Process Control, 137, 103197. [DOI].
- Spenger P, Graichen K (2023). Performance prediction of NMPC algorithms with incomplete optimization. In 22nd IFAC World Congress (pp. 7456-7461).
- Südhoff T, Ebner L, Schmidt J, Graichen K (2024). GP-based modeling for PSD control of emulsification processes. In 28th International Conference on System Theory, Control and Computing (ICSTCC).
- Burk D, Völz A, Graichen K (2022). A modular framework for distributed model predictive control of nonlinear continuous-time systems (GRAMPC-D). Optimization and Engineering, 23, 771-795. [DOI].
- Burk D, Völz A, Graichen K (2022). Improving the performance of distributed model predictive control by applying graph partitioning methods. In 26th International Conference on System Theory, Control and Computing (ICSTCC). [DOI].
- Dahlmann J, Volz A, Szabo T, Graichen K (2022). A Numerical Approach for Solving the Inversion Problem for n-Trailer Systems. In 2022 American Control Conference, ACC 2022 (pp. 2018-2024). Proceedings of the American Control Conference, 2022-June, 2018-2024. [DOI].
- Dahlmann J, Völz A, Szabo T, Graichen K (2022). A numerical approach for solving the inversion problem for general n-trailer systems.. In Proceedings 2022 American Control Conference (ACC) (pp. 2018-2024). [DOI].
- Dahlmann J, Völz A, Szabo T, Graichen K (2022). Trajectory optimization for truck-trailer systems based on predictive path-following control. In 6th IEEE Conference on Control Technology and Applications (CCTA). [DOI].
- Gold T, Römer R, Völz A, Graichen K (2022). Catching objects with a robot arm using model predictive control. In Proceedings 2022 American Control Conference (ACC) (pp. 1915-1920). [DOI].
- Huber H, Burk D, Graichen K (2022). Comparison of sensitivity-based and ADMM-based DMPC applied to building automation. In 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 546-553). [DOI].
- Kowalewski J, Lorenz A, Lomakin A, Alvarez R, Graichen K (2022). Circulating current control and energy balancing of a modular multilevel converter using model predictive control for HVDC applications. In 48th Annual Conference of the IEEE Industrial Electronics Society (IECON 2022). [DOI].
- Lamprecht A, Steffen D, Nagel K, Häcker J, Graichen K (2022). Online Model Predictive Motion Cueing With Real-Time Driver Prediction. IEEE Transactions on Intelligent Transportation Systems, 23(8), 12414-12428. [DOI].
- Landgraf D, Völz A, Graichen K (2022). Nonlinear model predictive control with latent force models. In Proceedings 2022 American Control Conference (ACC) (pp. 4979-4984). [DOI].
- Landgraf D, Völz A, Kontes G, Graichen K, Mutschler C (2022). Hierarchical learning for model predictive collision avoidance. In 10th Vienna International Conference on Mathematical Modelling (MATHMOD 22) (pp. 355-360). [DOI].
- Reinhard J, Löhe K, Graichen K (2022). Optimal current setpoint computation for externally excited synchronous machines. In 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 1319-1326). [DOI].
- Snobar F, Reinhard J, Huber H, Hoffmann M, Stelzig M, Vossiek M, Graichen K (2022). FOV-based model predictive object tracking for quadcopters. In 9th IFAC Symposium on Mechatronic Systems (Mechatronics 2022) (pp. 13 – 18). [DOI].
- Stecher J, Kiltz L, Graichen K (2022). Semi-infinite programming using Gaussian process regression for robust design optimization. In Proceedings European Control Conference (pp. 52-59). [DOI].
- Burk D, Völz A, Graichen K (2021). Experimental validation of the open-source DMPC framework GRAMPC-D applied to the remote-accessible robotarium. In IEEE International Conference on Mechatronics and Automation (ICMA). [DOI].
- Burk D, Völz A, Graichen K (2021). Towards asynchronous ADMM for distributed model predictive control of nonlinear systems. In Proceedings European Control Conference (ECC 2021) (pp. 1950-1955). [DOI].
- Gold T, Rohrmüller M, Völz A, Graichen K (2021). Model predictive interaction control for force closure grasping. In 2021 IEEE Conference on Decision and Control (CDC) (pp. 1018-1023). [DOI].
- Huber H, Graichen K (2021). A sensitivity-based distributed model predictive control algorithm for nonlinear continuous-time systems. In 5th IEEE Conference on Control Technology and Applications (CCTA) (pp. (accepted)). [DOI].
- Lamprecht A, Emmert T, Graichen K (2021). Learning-based driver prediction for MPC-based motion cueing algorithms. In Driving Simulation Conference Europe 2021 (DSC) (pp. 133 – 140).
- Lamprecht A, Steffen D, Häcker J, Graichen K (2021). Potential der modellprädiktiven Regelung für Fahrsimulatoren. At-Automatisierungstechnik, 69(2), 155-170. [DOI].
- Lukassek M, Völz A, Szabo T, Graichen K (2021). Model predictive path-following control for general n-trailer systems with an arbitrary guidance point. In Proceedings European Control Conference (ECC 2021) (pp. 1329-1334). [DOI].
- Völz A, Graichen K (2021). Gradient-based nonlinear model predictive control for systems with state-dependent mass matrix. In 2021 IEEE Conference on Decision and Control (CDC), accepted. [DOI].
- Burk D, Völz A, Graichen K (2020). Distributed optimization with ALADIN for non-convex optimal control problems. In 59th IEEE Conference on Decision and Control (CDC 2020). [DOI].
- Burk D, Völz A, Graichen K (2020). Neighbor approximations for distributed optimal control of nonlinear networked systems. In European Control Conference (ECC 2020) (pp. 1238-1243). [DOI].
- Englert T, Graichen K (2020). Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications. Control Engineering Practice, 99. [DOI].
- Gold T, Lomakin A, Goller T, Völz A, Graichen K (2020). Towards a Generic Manipulation Framework for Robots based on Model Predictive Interaction Control. In IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 401 – 407). [DOI].
- Gold T, Völz A, Graichen K (2020). Model Predictive Interaction Control for Industrial Robots. In 21st IFAC World Congress (pp. 10026 – 10033). [DOI].
- Gold T, Völz A, Graichen K (2020). Model Predictive Position and Force Trajectory Tracking Control for Robot-Environment Interaction. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 7397-7402). [DOI].
- Kruse T, Graichen K (2020). Moving horizon estimation for continuous glucose monitoring. In 7th International Conference on Biomedical Engineering and Systems (ICBES 20). [DOI].
- Lomakin A, Mayr A, Graichen K, Franke J (2020). Optimization of direct winding processes based on a holistic control approach. In Electric Drives Production Conference (E-DPC). [DOI].
- Lukassek M, Völz A, Szabo T, Graichen K (2020). Model predictive control for agricultural machines with implements. In Proceedings 28th Mediterranean Conference on Control and Automation (MED) (pp. 387-392). [DOI].
- Bestler A, Graichen K (2019). Distributed model predictive control for continuous-time nonlinear systems based on suboptimal ADMM. Optimal Control Applications & Methods, 40(1), 1-23. [DOI].
- Burk D, Völz A, Graichen K (2019). Towards a modular framework for distributed model predictive control of nonlinear neighbor-affine systems. In 58th IEEE Conference on Decision and Control (CDC 2019) (pp. 5279-5284). [DOI].
- Englert T, Völz A, Mesmer F, Rhein S, Graichen K (2019). A software framework for embedded nonlinear model predictive control using a gradient-based augmented Lagrangian approach (GRAMPC). Optimization and Engineering, 20(3), 769-809. [DOI].
- Gold T, Völz A, Graichen K (2019). External torque estimation for an industrial robot arm using joint torsion and motor current measurements. In Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS) and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS) (pp. 879-884). Vienna (Austria). [DOI].
- Lamprecht A, Steffen D, Häcker J, Graichen K (2019). Comparison between a Filter- and an MPC-based MCA in an Offline Simulator Study. In Driving Simulation Conference & Exhibition (DSC) (pp. 101-107).
- Lamprecht A, Steffen D, Häcker J, Graichen K (2019). Optimal control based reference generation for model predictive motion cueing algorithms. In 3rd IEEE Conference on Control Technology and Application (CCTA 2019) (pp. 203-208). Hong Kong (China). [DOI].
- Englert T, Graichen K (2018). A fixed-point iteration scheme for model predictive torque control of PMSMs. In Proceedings 6th IFAC Conference on Nonlinear Model Predictive Control (NMPC) (pp. 668-673). Madison, WI (USA).
- Graichen K, Hentzelt S (2015). A bi-level nonlinear predictive control scheme for hopping robots with hip and tail actuation. In Proceedings 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015) (pp. 4480-4485). Hamburg (Germany).
- Graichen K, Käpernick B (2012). A real-time gradient method for nonlinear model predictive control. In Zheng T (Eds.), Frontiers of Model Predictive Control, pp. 9-28. [DOI].
- Graichen K, Käpernick B (2012). Nonlinear MPC with systematic handling of a class of constraints. In Oberwolfach Report No. 12/2012 (Workshop “Control Theory: Mathematical Perspectives on Complex Networked Systems”) (pp. 17-18). Oberwolfach (Germany). [DOI].
- Harder K, Buchholz M, Späder T, Graichen K (2018). A real-time nonlinear air path observer for off-highway diesel engines. In Proceedings 2018 European Control Conference (ECC) (pp. 237-242). Limassol (Cyprus).
- Hentzelt S, Graichen K (2013). An augmented Lagrangian method in distributed dynamic optimization based on approximate neighbor dynamics. In Proceedings IEEE Intern. Conf. Systems, Man, and Cybernetics (SMC 2013) (pp. 571-576). Manchester (UK).
- Hentzelt S, Graichen K (2012). Dual decomposition of optimal control problems with coupled nonlinear dynamics. In CD-ROM Proceedings European Congress on Computational Methods in Applied Sciences and Engineering (ECCOMAS 2012). Vienna (Austria).
- Hentzelt S, Graichen K (2014). Experimental results for distributed model predictive control applied to a water distribution system. In Proceedings 2014 IEEE Multi-Conference on Systems and Control (pp. 1100-1106). Nice (France).
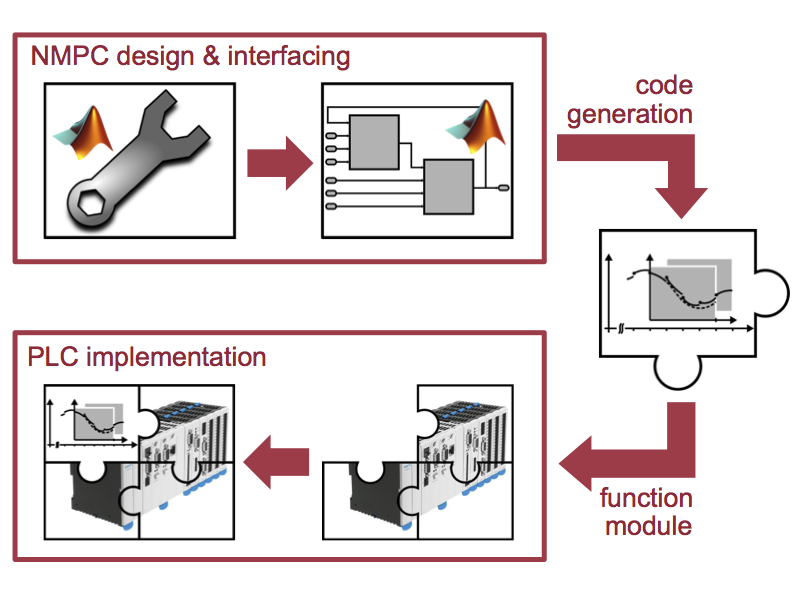
- Kaepernick B, Graichen K (2014). PLC implementation of a nonlinear model predictive controller. In Proceedings 19th IFAC World Congress (pp. 1892-1897). Cape Town (South Africa).
- Käpernick B, Graichen K (2013). Transformation of output constraints in optimal control applied to a double pendulum on a cart. In Proceedings 9th IFAC Symposium “Nonlinear Control Systems” (NOLCOS) (pp. 193-198). Toulouse (Italy).
- Käpernick B, Graichen K (2013). Model predictive control of an overhead crane using constraint substitution. In Proceedings 2013 American Control Conference (ACC) (pp. 3979-3984). Washington, DC (USA).
- Käpernick B, Graichen K (2014). Nichtlineare modellprädiktive Regelung auf SPS. Automatisierungstechnische Praxis, 56, 38-46. [DOI].
- Käpernick B, Graichen K (2014). The gradient based nonlinear model predictive control software GRAMPC. In Proceedings 13th European Control Conference (ECC) (pp. 1170-1175). Strasbourg (France).
- Käpernick B, Hentzelt S, Graichen K (2013). A parallelizable decomposition approach for constrained optimal control problems. In Proceedings 52th IEEE Conference on Decision and Control (CDC) (pp. 5783-5788). Florence (Italy).
- Käpernick B, Süß S, Schubert E, Graichen K (2014). A synthesis strategy for nonlinear model predictive controller on FPGA. In Proceedings 2014 UKACC 10th International Conference on Control (pp. 662-667). Loughborough (UK).
- Lamprecht A, Häcker J, Graichen K (2018). Constrained motion cueing for driving simulators using a real-time nonlinear MPC scheme. In Proceedings 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 7466-7471). Madrid (Spain).
- Rhein S, Graichen K (2018). Constrained trajectory planning and actuator design for electromagnetic heating systems. Control Engineering Practice, 74, 191-203.
- Rhein S, Utz T, Graichen K (2014). Efficient state constraint handling for MPC of the heat equation. In Proceedings 2014 UKACC 10th International Conference on Control (pp. 663-668). Loughborough (UK).
- Rhein S, Utz T, Graichen K (2013). Model predictive control and moving horizon estimation of a large-scale chemical reactor model. In Proceedings 1st {IFAC} Symposium on Control of Systems Governed by Partial Differential Equations (CPDE) (pp. 121-126). Paris (France).
- Utz T, Rhein S, Graichen K (2014). Transformation approach to constraint handling in optimal control of the heat equation. In Proceedings 19th IFAC World Congress (pp. 9135-9140). Cape Town (South Africa).
Mechatronics & Automotive

Mechatronic systems consist of both mechanical and electrical components. Typical challenges are the high integration of these systems along with the limited computational resources of embedded hardware such as electronic control units (ECUs) in automotive applications. We have a successful history of bridging the gap between theory and practice in close cooperation with industrial partners from the mechatronics and automotive domain.
Contact
Prof. Dr.-Ing. Knut Graichen
Tel.: +49 9131 85-27127
E-Mail | Homepage
Dr.-Ing. Andreas Michalka
Tel.: +49 9131 85-28592
E-Mail | Homepage
Highly integrated mechatronic systems can, for instance, be found in electric drives, power trains, and sensors. Future mechatronic applications will not only involve classical control loops, but will also be equipped with further intelligent and autonomous functionalities such as automatic calibration, fault-tolerant operation and predictive maintenance.
Automotive-related applications such as passenger cars, trucks or agricultural machines involve a multitude of control systems. This ranges from active suspension, traction control, assisted driving up to fully autonomous driving. On the lower level, efficient embedded control implementations are predominant, whereas higher level control loops involve complex decision making in combination with environmental perception.
State-of-the-art modeling approaches of mechatronic systems combine physics-based and data-driven design methods to account for the uncertainties introduced, for example, by wear, aging and serial production spread. A particular expertise of the Chair is to leverage these hybrid models for sophisticated control schemes and the development of tailored algorithms for real-time capable implementations.



Videos
Related projects since 2021
Funding source: Bayerische Forschungsstiftung
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications
- Dahlmann J, Graichen K, Völz A (2024). Ein Konzept zum automatisierten Rangieren von Fahrzeugen mit Anhängern. At-Automatisierungstechnik, 72(4), 354-368. [DOI].
- Dahlmann J, Völz A, Lukassek M, Graichen K (2024). Local predictive optimization of globally planned motions for truck-trailer systems. IEEE Transactions on Control Systems Technology, 32(5), 1555-1568. [DOI].
- Dio M, Demir O, Trachte A, Graichen K (2023). Safe active learning and probabilistic design of experiment for autonomous hydraulic excavators. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 9685-9690).
- Goppelt-Schneider F, Schmidt-Vollus R, Graichen K (2024). Trajectory tracking control for multilevel pressure boosting systems. In 28th International Conference on System Theory, Control and Computing (ICSTCC).
- Harder K, Niemeyer J, Remele J, Graichen K (2023). Hierarchical model predictive control for an off-highway Diesel engine with SCR catalyst. International Journal of Engine Research. [DOI].
- Hartmann P, Graichen K (2025). Learning-based uncertainty-aware predictive control of truck-trailer systems in rough terrain. In 19th IEEE International Conference on Control & Automation (ICCA).
- Lukassek M, Dahlmann J, Völz A, Graichen K (2024). Model predictive path-following control for truck–trailer systems with specific guidance points – Design and experimental validation. Mechatronics, 100, 103190. [DOI].
- Löhe K, Reinhard J, Petrasch N, Kallabis S, Graichen K, Mucha M (2024). Work Roll Speed Drop Compensation for Hot Strip Mills Reduces Drivetrain Wear and Increases Strip Quality. In AISTech 2024 Iron and Steel Technology Conference (pp. 1212-1223). Warrendale, PA. [DOI].
- Rabenstein G, Ullrich L, Graichen K (2024). Sampling for model predictive trajectory planning in autonomous driving using normalizing flows. In 35th IEEE Intelligent Vehicles Symposium (IEEE IV 2024) (pp. 2091-2096).
- Reinhard J, Löhe K, Graichen K (2024). Optimal dynamic current control for externally excited synchronous machines. In 2024 IEEE Conference on Control Technology and Applications (CCTA) (pp. 146-152). [DOI].
- Reinhard J, Löhe K, Petrasch N, Kallabis S, Graichen K (2024). Dynamic compensation of the threading speed drop in rolling processes. Journal of Process Control, 137, 103197. [DOI].
- Santer P, Reinhard J, Schindler A, Graichen K (2025). Detection of localized bearing faults in PMSMs by means of envelope analysis and wavelet packet transform using motor speed and current signals. Mechatronics, 106. [DOI].
- Schumann M, Ebersberger S, Graichen K (2023). Online learning and adaptation of nonlinear thermal networks for power inverters. In 49th Annual Conference of the IEEE Industrial Electronics Society (IECON 2023).
- Schumann M, Ebersberger S, Graichen K (2023). Improved nonlinear estimation in thermal networks using machine learning. In IEEE International Conference on Mechatronics (ICM 2023). [DOI].
- Schumann M, Graichen K (2024). PINN-based dynamical modeling and state estimation in power inverters. In 2024 IEEE Conference on Control Technology and Applications (CCTA).
- Snobar F, Michalka A, Horn M, Strohmeyer C, Graichen K (2023). Rack force estimation from standstill to high speeds by hybrid model design and blending. In IEEE International Conference on Mechatronics (ICM 2023). [DOI].
- Snobar F, Michalka A, Horn M, Strohmeyer C, Graichen K (2024). Sensitivity-based moving horizon estimation of road friction. In European Control Conference (pp. 718-724).
- Ullrich L, Buchholz M, Dietmayer K, Graichen K (2024). AI safety assurance for automated vehicles: A survey on research, standardization, regulation. IEEE Transactions on Intelligent Vehicles. [DOI].
- Ullrich L, Buchholz M, Dietmayer K, Graichen K (2024). Expanding the Classical V-Model for the Development of Complex Systems Incorporating AI. IEEE Transactions on Intelligent Vehicles. [DOI].
- Ullrich L, Buchholz M, Petit J, Dietmayer K, Graichen K (2025). A Concept for Efficient Scalability of Automated Driving Allowing for Technical, Legal, Cultural, and Ethical Differences. In 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC).
- Ullrich L, McMaster A, Graichen K (2024). Transfer learning study of motion transformer based trajectory predictions. In 35th IEEE Intelligent Vehicles Symposium (IEEE IV 2024) (pp. 110-117).
- Ullrich L, Mujirishvili Z, Graichen K (2025). Enhancing system self-awareness and trust of AI: A case study in trajectory prediction and planning. In 36th IEEE Intelligent Vehicles Symposium (IEEE IV 2025).
- Ullrich L, Völz A, Graichen K (2023). Robust meta-learning of vehicle yaw rate dynamics via conditional neural processes. In 62nd IEEE Conference on Decision and Control (CDC) (pp. 322-327).
- Ullrich L, Zimmer W, Greer R, Graichen K, Knoll AC, Trivedi M (2025). A New Perspective On AI Safety Through Control Theory Methodologies. IEEE Open Journal of Intelligent Transportation Systems, 6, 938-966. [DOI].
- Bergmann D, Harder K, Niemeyer J, Graichen K (2022). Nonlinear MPC of a Heavy-Duty Diesel Engine With Learning Gaussian Process Regression. IEEE Transactions on Control Systems Technology, 30(1), 113-129. [DOI].
- Dahlmann J, Volz A, Szabo T, Graichen K (2022). A Numerical Approach for Solving the Inversion Problem for n-Trailer Systems. In 2022 American Control Conference, ACC 2022 (pp. 2018-2024). Proceedings of the American Control Conference, 2022-June, 2018-2024. [DOI].
- Dahlmann J, Völz A, Szabo T, Graichen K (2022). A numerical approach for solving the inversion problem for general n-trailer systems.. In Proceedings 2022 American Control Conference (ACC) (pp. 2018-2024). [DOI].
- Dahlmann J, Völz A, Szabo T, Graichen K (2022). Trajectory optimization for truck-trailer systems based on predictive path-following control. In 6th IEEE Conference on Control Technology and Applications (CCTA). [DOI].
- Rabenstein G, Demir O, Trachte A, Graichen K (2022). Data-driven feed-forward control of hydraulic cylinders using Gaussian process regression for excavator assistance functions. In 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 962-969). [DOI].
- Reinhard J, Löhe K, Graichen K (2022). Optimal current setpoint computation for externally excited synchronous machines. In 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 1319-1326). [DOI].
- Schumann M, Ebersberger S, Graichen K (2022). Dynamic and stationary state estimation of fluid cooled three-phase inverters. In 26th IEEE International Symposium on Power Electronics, Electrical Drives Automation and Motion (SPEEDAM 2022). [DOI].
- Lukassek M, Völz A, Szabo T, Graichen K (2021). Model predictive path-following control for general n-trailer systems with an arbitrary guidance point. In Proceedings European Control Conference (ECC 2021) (pp. 1329-1334). [DOI].
- Bergmann D, Graichen K (2020). Safe Bayesian Optimization under Unknown Constraints. In 59th IEEE Conference on Decision and Control, CDC 2020 (pp. 3592-3597). [DOI].
- Englert T, Graichen K (2020). Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications. Control Engineering Practice, 99. [DOI].
- Geiselhart R, Bergmann D, Niemeyer J, Remele J, Graichen K (2020). Hierarchical Predictive Control of a Combined Engine/Selective Catalytic Reduction System with Limited Model Knowledge. SAE International Journal of Engines, 13(2). [DOI].
- Geiselhart R, Bergmann D, Niemeyer J, Remele J, Graichen K (2020). Hierarchical predictive control of a combined engine/SCR system with limited model knowledge. SAE International Journal of Engines, 13(2). [DOI].
- Lukassek M, Völz A, Szabo T, Graichen K (2020). Model predictive control for agricultural machines with implements. In Proceedings 28th Mediterranean Conference on Control and Automation (MED) (pp. 387-392). [DOI].
- Mesmer F, Szabo T, Graichen K (2020). Learning feedforward control of a hydraulic clutch actuation path based on policy gradients. In 59th IEEE Conference on Decision and Control (CDC 2020). [DOI].
- Bergmann D, Geiselhart R, Graichen K (2019). Modelling and control of a heavy-duty Diesel engine gas path with Gaussian process regression. In Proc. European Control Conference (ECC 2019) (pp. 1207-1213). Naples (Italy). [DOI].
- Bergmann D, Graichen K (2019). Gaußprozessregression zur Modellierung zeitvarianter Systeme. At-Automatisierungstechnik, 67(8), 637-647. [DOI].
- Mesmer F, Szabo T, Graichen K (2019). Learning methods for the feedforward control of a hydraulic clutch actuation path. In Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2019) (pp. 733-738). Hong Kong (China). [DOI].
- Mesmer F, Szabo T, Graichen K (2019). Feedforward control of a hydraulic clutch actuation path. In Proc. European Control Conference (ECC 2019) (pp. 620-626). Naples (Italy). [DOI].
- Englert T, Graichen K (2018). A fixed-point iteration scheme for model predictive torque control of PMSMs. In Proceedings 6th IFAC Conference on Nonlinear Model Predictive Control (NMPC) (pp. 668-673). Madison, WI (USA).
- Harder K, Buchholz M, Späder T, Graichen K (2018). A real-time nonlinear air path observer for off-highway diesel engines. In Proceedings 2018 European Control Conference (ECC) (pp. 237-242). Limassol (Cyprus).
- Käpernick B, Graichen K (2013). Model predictive control of an overhead crane using constraint substitution. In Proceedings 2013 American Control Conference (ACC) (pp. 3979-3984). Washington, DC (USA).
- Käpernick B, Graichen K (2013). Transformation of output constraints in optimal control applied to a double pendulum on a cart. In Proceedings 9th IFAC Symposium “Nonlinear Control Systems” (NOLCOS) (pp. 193-198). Toulouse (Italy).
Robotics
Robotics deals in general with machines that can assist in or perform the execution of tasks such as assembly or machining by industrial robots. Research projects in this area concern, for example, the control of motions and forces in human-robot interaction as well as the planning of paths and trajectories for mobile and collaborative robots.
Contact
Dr.-Ing. Andreas Völz
Tel.: +49 9131 85-61036
E-Mail | Homepage
Prof. Dr.-Ing. Knut Graichen
Tel.: +49 9131 85-27127
E-Mail | Homepage
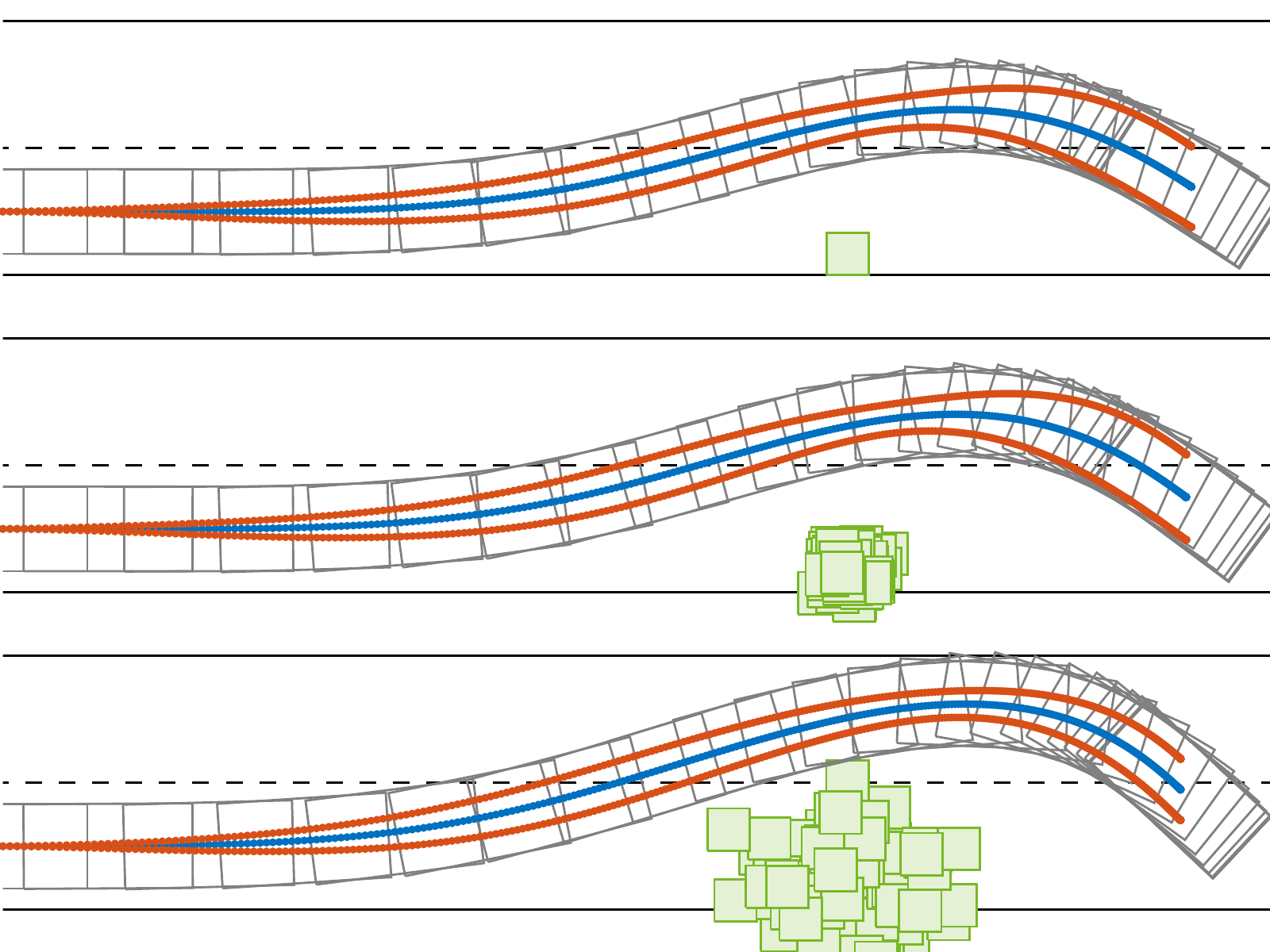
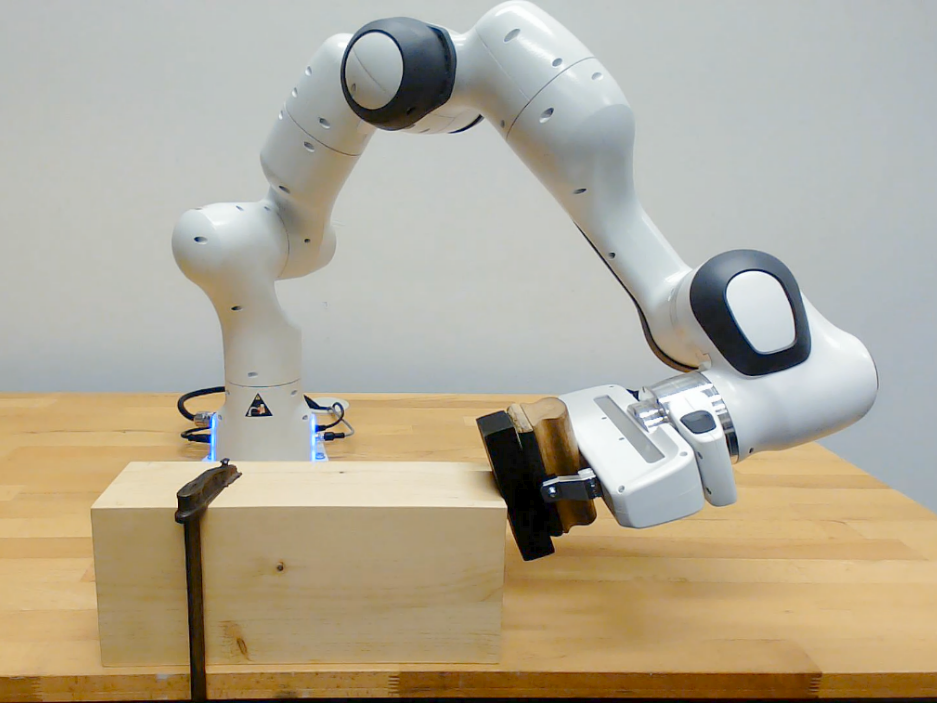
Robots should move and interact with humans as efficiently as possible. If this includes high velocities or heavy payloads, the nonlinear rigid body dynamics as well as the input constraints need to be taken into account, which leads to a computationally demanding optimization problem. On the other hand, when the robot is in contact with its environment, the rigid body dynamics are often less relevant, but the forces and torques that arise must be considered by the control system. This is especially important for safe human-robot interaction. Here, the challenges include the contact modelling (e.g. stiffness and friction), the safe handling of contact loss, or the selection of controller parameters for different applications. Current research considers model predictive interaction control (MPIC), which refers to MPC with explicit prediction of contact forces and torques, as well as the development of specialized algorithms for solving optimization problems with rigid body dynamics.


Besides controlling motions, also the planning of paths (geometric description) and trajectories (time information) is a relevant problem for many types of robots. In particular for mobile and collaborative robots, motions should be planned in such a way that they do not cause self-collisions or collisions with obstacles in the environment. Global planners iteratively build a search structure that explores the space of possible motions, whereas local planners only search in the neighborhood of an initial solution. In order to efficiently find high-quality solutions, it is necessary to combine the advantages of both global and local planning methods. Further difficulties arise in dynamic environments, where the future motion of obstacles needs to be predicted or for car-like robots, where the non-holonomic kinematics need to be considered.

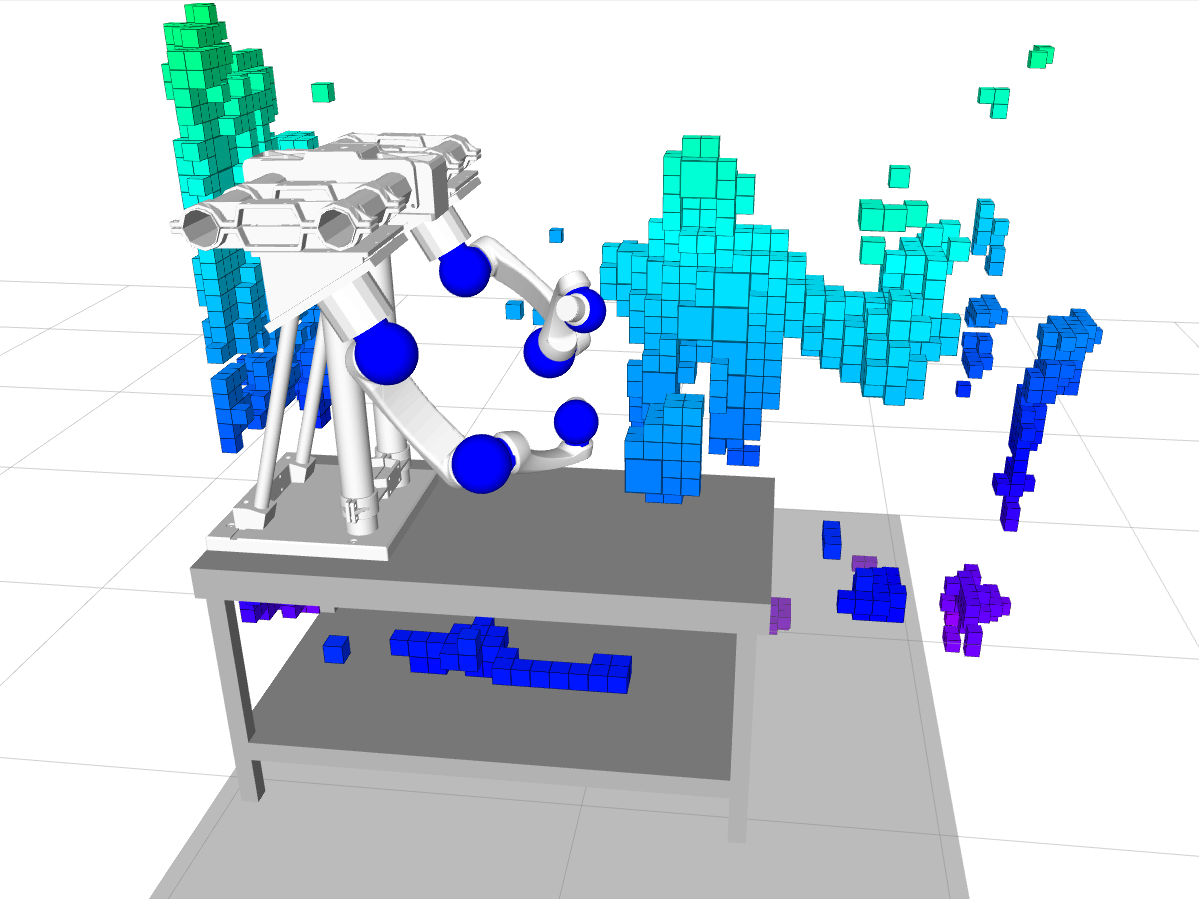

The Chair is equipped with a mobile dual-arm robot as well as a motion capturing system that have been funded by the German Research Foundation (Deutsche Forschungsgemeinschaft, DFG) through the major instrumentation proposal INST 90/1167-1 FUGG. The system enables the experimental validation of planning and control methods for mobile manipulation in workspaces shared with humans. For more information contact Prof. Dr.-Ing. Knut Graichen or Dr.-Ing. Andreas Völz.
Videos
- Writing on a blackboard with chalk – MPIC hybrid force/motion control (IEEE IROS 2020: DOI: 10.1109/IROS45743.2020.9341168)
- Anthropomorphic in-hand manipulation – MPIC for force closure grasping (IEEE CDC 2021)
- Catching objects in flight – MPIC for time-optimal trajectory planning
- Admittance control of the XPlanar system for human-mover interaction
- Collision-free motion planning for a rotating robot with seven degrees of freedom
- Collision-free motion planning for a dual-arm robot with twelve degrees of freedom
- Motion planning for a dual-arm robot with closed kinematics
- Predictive path-following control for continuous replanning with dynamic roadmaps (IEEE RA-L 2019, DOI: 1109/LRA.2019.2929990)
Related projects since 2021
Funding source: Deutsche Forschungsgemeinschaft (DFG)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Precise interactions as part of industrial manufacturing tasks are typically very complex to characterize and implement. One reason for this is the heterogeneity of the task-specific requirements for the motion and control behavior. A direct implementation of the task into a robot program therefore requires highly qualified specialists and is only profitable for large lot sizes. For a flexible applicability and easy (re-)configuration of the robot system, an approach to programming by kinesthetic…
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)
Project leader:
Dr.-Ing. Andreas Völz
Senior Lecturer
Dual-armrobots offer a high potential for automation technology, as they canbe used to implement tasks that are not possible with one arm alone.This includes in particular the manipulation of large or heavyobjects that exceed the payload of a single arm. Illustrativeexamples are the movement of beverage crates, long boards or pipes,which are also preferably grasped by humans with both hands.
However,cooperative manipulation is particularly challenging, because botharms and the grasped object…
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Funding source: Industrie
Project leader:
Prof. Dr.-Ing. Knut Graichen
Chair holder
Related publications
- Dio M, Graichen K, Völz A (2024). Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2024 (pp. 3043-3048). IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3043-3048. [DOI].
- Dio M, Graichen K, Völz A (2024). Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3043-3048).
- Dio M, Völz A, Graichen K (2023). Cooperative dual-arm control for heavy object manipulation based on hierarchical quadratic programming. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 643-648).
- Dio M, Wahrburg A, Enayati N, Graichen K, Völz A (2025). Time-Optimal Path Parameterization with Viscous Friction and Jerk Constraints based on Reachability Analysis. In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
- Gold T, Völz A, Graichen K (2023). Model predictive interaction control for robotic manipulation tasks. IEEE Transactions on Robotics, 39(1), 76-89. [DOI].
- Goller T, Brohm D, Völz A, Graichen K (2024). DMP-based path planning for model predictive interaction control. In European Control Conference (pp. 128-133).
- Goller T, Hopf V, Völz A, Graichen K (2025). Fault Handling in Robotic Manipulation Tasks for Model Predictive Interaction Control. IEEE Robotics and Automation Letters, 10(9), 9002 – 9009. [DOI].
- Goller T, Völz A, Graichen K (2024). A Programming by Demonstration Approach for Robotic Manipulation with Model Predictive Interaction Control. In 2024 IEEE Conference on Control Technology and Applications (CCTA) (pp. 799-804).
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2025). Estimation of input rotation speed in gauge-sensorized strain wave gears. In 2025 IEEE Conference on Control Technology and Applications (CCTA).
- Kißkalt J, Michalka A, Strohmeyer C, Horn M, Graichen K (2025). Model-based fault simulation and detection for gauge-sensorized strain wave gears. In 11th Vienna International Conference on Mathematical Modelling (MATHMOD 25) (pp. 271 – 276). [DOI].
- Rabenstein G, Völz A, Graichen K (2025). Cable Manipulation for Contact Shaping Tasks using Elastic Rods. In IEEE International Conference on Advanced Robotics and Mechatronics (ICARM).
- Rohrmüller M, Beckerle P, Graichen K, Malvezzi M, Pozzi M (2023). In-Hand Manipulation with Synergistic Actuated Robotic Hands: An MPC-Based Approach. In 22nd IEEE-RAS International Conference on Humanoid Robots, Humanoids 2023. [DOI].
- Santer P, Völz A, Graichen K (2025). A Model Predictive Control Approach to Trajectory Tracking with Human-Robot Collision Avoidance. In 2025 IEEE Conference on Control Technology and Applications (CCTA).
- Gold T, Römer R, Völz A, Graichen K (2022). Catching objects with a robot arm using model predictive control. In Proceedings 2022 American Control Conference (ACC) (pp. 1915-1920). [DOI].
- Goller T, Gold T, Völz A, Graichen K (2022). Model predictive interaction control based on a path-following formulation. In Proceedings IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 551-556). [DOI].
- Lamprecht A, Steffen D, Nagel K, Häcker J, Graichen K (2022). Online Model Predictive Motion Cueing With Real-Time Driver Prediction. IEEE Transactions on Intelligent Transportation Systems, 23(8), 12414-12428. [DOI].
- Snobar F, Reinhard J, Huber H, Hoffmann M, Stelzig M, Vossiek M, Graichen K (2022). FOV-based model predictive object tracking for quadcopters. In 9th IFAC Symposium on Mechatronic Systems (Mechatronics 2022) (pp. 13 – 18). [DOI].
- Burk D, Völz A, Graichen K (2021). Experimental validation of the open-source DMPC framework GRAMPC-D applied to the remote-accessible robotarium. In IEEE International Conference on Mechatronics and Automation (ICMA). [DOI].
- Gold T, Rohrmüller M, Völz A, Graichen K (2021). Model predictive interaction control for force closure grasping. In 2021 IEEE Conference on Decision and Control (CDC) (pp. 1018-1023). [DOI].
- Lamprecht A, Emmert T, Graichen K (2021). Learning-based driver prediction for MPC-based motion cueing algorithms. In Driving Simulation Conference Europe 2021 (DSC) (pp. 133 – 140).
- Lamprecht A, Steffen D, Häcker J, Graichen K (2021). Potential der modellprädiktiven Regelung für Fahrsimulatoren. At-Automatisierungstechnik, 69(2), 155-170. [DOI].
- Völz A, Graichen K (2021). Gradient-based nonlinear model predictive control for systems with state-dependent mass matrix. In 2021 IEEE Conference on Decision and Control (CDC), accepted. [DOI].
- Gold T, Lomakin A, Goller T, Völz A, Graichen K (2020). Towards a Generic Manipulation Framework for Robots based on Model Predictive Interaction Control. In IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 401 – 407). [DOI].
- Gold T, Völz A, Graichen K (2020). Model Predictive Interaction Control for Industrial Robots. In 21st IFAC World Congress (pp. 10026 – 10033). [DOI].
- Gold T, Völz A, Graichen K (2020). Model Predictive Position and Force Trajectory Tracking Control for Robot-Environment Interaction. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 7397-7402). [DOI].
- Graichen K, Völz A (2020). Prädiktive Pfadfolgeregelung für die kollisionsfreie Bewegungsplanung von Robotern. At-Automatisierungstechnik, 68(7), 557-570. [DOI].
- Völz A, Graichen K (2020). Prädiktive Pfadfolgeregelung für die kollisionsfreie Bewegungsplanung von Robotern. At-Automatisierungstechnik, 68(7), 557-570. [DOI].
- Gold T, Völz A, Graichen K (2019). External torque estimation for an industrial robot arm using joint torsion and motor current measurements. In Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS) and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS) (pp. 879-884). Vienna (Austria). [DOI].
- Lamprecht A, Steffen D, Häcker J, Graichen K (2019). Comparison between a Filter- and an MPC-based MCA in an Offline Simulator Study. In Driving Simulation Conference & Exhibition (DSC) (pp. 101-107).
- Lamprecht A, Steffen D, Häcker J, Graichen K (2019). Optimal control based reference generation for model predictive motion cueing algorithms. In 3rd IEEE Conference on Control Technology and Application (CCTA 2019) (pp. 203-208). Hong Kong (China). [DOI].
- Völz A, Graichen K (2019). A predictive path-following controller for continuous replanning with dynamic roadmaps. IEEE Robotics and Automation Letters, 4(4), 3963-3970. [DOI].
- Graichen K, Hentzelt S (2015). A bi-level nonlinear predictive control scheme for hopping robots with hip and tail actuation. In Proceedings 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015) (pp. 4480-4485). Hamburg (Germany).
- Lamprecht A, Häcker J, Graichen K (2018). Constrained motion cueing for driving simulators using a real-time nonlinear MPC scheme. In Proceedings 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 7466-7471). Madrid (Spain).
- Völz A, Graichen K (2016). Distance metrics for path planning with dynamic roadmaps. In Proceedings 47th International Symposium on Robotics (ISR) (pp. 126-132). München (Germany).
- Völz A, Graichen K (2018). An optimization-based approach to dual-arm motion planning with closed kinematics. In Proceedings 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 8346-8351). Madrid (Spain).
- Völz A, Graichen K (2017). Composition of dynamic roadmaps for dual-arm motion planning. In Proceedings 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM 2017) (pp. 1242-1248). Munich (Germany).
- Völz A, Graichen K (2018). Computation of collision distance and gradient using an automatic sphere approximation of the robot model with bounded error. In Proceedings 50th International Symposium on Robotics (ISR) (pp. 322-329). München (Germany).
Publications
- Conrad, P., Michalka, A., Beck, J., & Graichen, K. (2025). Nonlinear MPC for Stabilizing the Longitudinal Dynamics of a Highly Maneuverable Aircraft. In Proc. 2025 IEEE Aerospace Conference. Big Sky, Montana (USA).
- Conrad, P., Steuter, L., Pierer von Esch, M., Beck, J., & Graichen, K. (2025). Aerodynamic neural network modeling for gradient-based model predictive flight control. In Proc. 33rd Mediterranean Conference on Control and Automation (MED 2025).
- Dio, M., Wahrburg, A., Enayati, N., Graichen, K., & Völz, A. (2025). Time-Optimal Path Parameterization with Viscous Friction and Jerk Constraints based on Reachability Analysis. In Proceedings of the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Hangzhou, CN.
- Goller, T., Hopf, V., Völz, A., & Graichen, K. (2025). Fault Handling in Robotic Manipulation Tasks for Model Predictive Interaction Control. IEEE Robotics and Automation Letters, 10(9), 9002 - 9009. https://doi.org/10.1109/LRA.2025.3592069
- Hartmann, P., & Graichen, K. (2025). Learning-based uncertainty-aware predictive control of truck-trailer systems in rough terrain. In Institute of Electrical and Electronics Engineers (IEEE) (Eds.), Proceedings of the 19th IEEE International Conference on Control & Automation (ICCA). Tallinn (Estonia), EE.
- Kißkalt, J., Michalka, A., Strohmeyer, C., Horn, M., & Graichen, K. (2025). Estimation of input rotation speed in gauge-sensorized strain wave gears. In Proceedings of the 2025 IEEE Conference on Control Technology and Applications (CCTA). San Diego (USA).
- Kißkalt, J., Michalka, A., Strohmeyer, C., Horn, M., & Graichen, K. (2025). Model-based fault simulation and detection for gauge-sensorized strain wave gears. In IFAC-PapersOnLine (pp. 271 - 276). Vienna (Austria).
- Kowalewski, J., Lorenz, A., Thomas, F., Valenzuela, R.A.A., & Graichen, K. (2025). Passivity-Based Robust Stability Analysis of the Converter–Grid Interaction and Passivity-Shaping Controller Design. IET Generation Transmission & Distribution, 19(1). https://doi.org/10.1049/gtd2.70090
- Kruse, T., Griebel, T., & Graichen, K. (2025). Adaptive Kalman filtering: Measurement and process noise covariance estimation using Kalman smoothing. IEEE Access, 13, 11863-11875. https://doi.org/10.1109/ACCESS.2025.3528348
- Landgraf, D., Völz, A., & Graichen, K. (2025). A software framework for stochastic model predictive control of nonlinear continuous-time systems (GRAMPC-S). Optimization and Engineering. https://doi.org/10.1007/s11081-025-10006-z
- Landgraf, D., Wietzke, T., & Graichen, K. (2025). Stochastic model predictive control with switched latent force models. European Journal of Control, 85, 101311. https://doi.org/10.1016/j.ejcon.2025.101311
- Pierer von Esch, M., Nistler, E., Völz, A., & Graichen, K. (2025). Sensitivity-based distributed NMPC: Experimental results for a levitating planar motion system. IEEE Transactions on Control Systems Technology. https://doi.org/10.1109/TCST.2025.3530165
- Pierer von Esch, M., Völz, A., & Graichen, K. (2025). A fixed-point iteration scheme for sensitivity-based distributed optimal control. IEEE Transactions on Automatic Control, 70(4), 2778-2785. https://doi.org/10.1109/TAC.2024.3505753
- Pierer von Esch, M., Völz, A., & Graichen, K. (2025). Asynchronous sensitivity-based distributed optimal control for nonlinear systems. In Proceedings of the 2025 American Control Conference (ACC). Denver, CO (USA).
- Pierer von Esch, M., Völz, A., & Graichen, K. (2025). Sensitivity-Based Distributed Model Predictive Control for Nonlinear Systems under Inexact Optimization. Optimal Control Applications & Methods, (accepted).
- Rabenstein, G., Völz, A., & Graichen, K. (2025). Cable Manipulation for Contact Shaping Tasks using Elastic Rods. In Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM). Portsmouth.
- Ren, Y., Deichsel, F., Hopf, V., Seiler, J., Kaup, A., & Beckerle, P. (2025). Networked Systems Diagnostics: A Fusion of Failure Mode and Effects Analysis and a Delphi Expert Study. In 2024 IEEE International Conference on Systems, Man, and Cybernetics (SMC) (pp. 2041-2046). Kuching, MY: Institute of Electrical and Electronics Engineers Inc..
- Santer, P., Reinhard, J., Schindler, A., & Graichen, K. (2025). Detection of localized bearing faults in PMSMs by means of envelope analysis and wavelet packet transform using motor speed and current signals. Mechatronics, 106. https://doi.org/10.1016/j.mechatronics.2025.103294
- Santer, P., Völz, A., & Graichen, K. (2025). A Model Predictive Control Approach to Trajectory Tracking with Human-Robot Collision Avoidance. In Proceedings of the 2025 IEEE Conference on Control Technology and Applications (CCTA). San Diego, US.
- Stecher, J., Kiltz, L., & Graichen, K. (2025). Generalized tolerance optimization for robust system design by adaptive learning of Gaussian processes. IEEE Access, (accepted).
- Südhoff, T., Hsuan-Yang, S., Villwock, J., Bliatsiou, C., Topalovic, D., Graichen, K.,... Knorn, S. (2025). Closed-loop control of a liquid-liquid mixer using MPC and GPR-models. In Proceedings of the 33rd Mediterranean Conference on Control and Automation (MED 2025). Tangier, Morocco, MA.
- Ullrich, L., Buchholz, M., Dietmayer, K., & Graichen, K. (2025). Expanding the Classical V-Model for the Development of Complex Systems Incorporating AI. IEEE Transactions on Intelligent Vehicles, 10(3), 1790-1804. https://doi.org/10.1109/TIV.2024.3434515
- Ullrich, L., Buchholz, M., Petit, J., Dietmayer, K., & Graichen, K. (2025). A Concept for Efficient Scalability of Automated Driving Allowing for Technical, Legal, Cultural, and Ethical Differences. In Proceedings of the 2025 IEEE 28th International Conference on Intelligent Transportation Systems (ITSC). Gold Coast (Australia).
- Ullrich, L., Mujirishvili, Z., & Graichen, K. (2025). Enhancing system self-awareness and trust of AI: A case study in trajectory prediction and planning. In Proceedings of the 36th IEEE Intelligent Vehicles Symposium (IEEE IV 2025). Cluj-Napoca (Romania).
- Ullrich, L., Zimmer, W., Greer, R., Graichen, K., Knoll, A.C., & Trivedi, M. (2025). A New Perspective On AI Safety Through Control Theory Methodologies. IEEE Open Journal of Intelligent Transportation Systems, 6, 938-966. https://doi.org/10.1109/OJITS.2025.3585274
- Wietzke, T., & Graichen, K. (2025). Physics-informed sparse Gaussian processes for model predictive control in building energy systems. In IFAC-PapersOnLine (pp. 43-48). Vienna (Austria).
- Wietzke, T., Landgraf, D., & Graichen, K. (2025). Application of stochastic model predictive control for building energy systems using latent force models. At-Automatisierungstechnik, 73(6), 441-450. https://doi.org/10.1515/auto-2024-0160
- Cherian, A.J., Michalka, A., Murray, K., Roell, G., & Graichen, K. (2024). Control approaches for operating point stabilization of microring resonator modulators under fast perturbations. In Graham T. Reed, Andrew P. Knights (Eds.), Proceedings Silicon Photonics XIX (pp. 128910D). SPIE.
- Conrad, P., & Graichen, K. (2024). A sensitivity-based approach to self-triggered nonlinear model predictive control. IEEE Access, 12, 153243-153252. https://doi.org/10.1109/ACCESS.2024.3480522
- Dahlmann, J., Graichen, K., & Völz, A. (2024). Ein Konzept zum automatisierten Rangieren von Fahrzeugen mit Anhängern.
- Dahlmann, J., Völz, A., Lukassek, M., & Graichen, K. (2024). Local predictive optimization of globally planned motions for truck-trailer systems. IEEE Transactions on Control Systems Technology, 32(5), 1555-1568. https://doi.org/10.1109/TCST.2023.3345169
- Dio, M., Graichen, K., & Völz, A. (2024). Time-Optimal Path Parameterization for Cooperative Multi-Arm Robotic Systems with Third-Order Constraints. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3043-3048). Abu Dhabi, AE: Institute of Electrical and Electronics Engineers Inc..
- Goller, T., Brohm, D., Völz, A., & Graichen, K. (2024). DMP-based path planning for model predictive interaction control. In Proceedings of the European Control Conference (pp. 128-133). Stockholm (Sweden).
- Goller, T., Völz, A., & Graichen, K. (2024). A Programming by Demonstration Approach for Robotic Manipulation with Model Predictive Interaction Control. In Proceedings of the 2024 IEEE Conference on Control Technology and Applications (CCTA) (pp. 799-804). Newcastle upon Tyne, United Kingdom.
- Goppelt-Schneider, F., Schmidt-Vollus, R., & Graichen, K. (2024). Trajectory tracking control for multilevel pressure boosting systems. In Proceedings of the 28th International Conference on System Theory, Control and Computing (ICSTCC). Sinaia, Romania.
- Hippe, P. (2024). Design of MIMO PI-compensators without exponentially unstable poles. At-Automatisierungstechnik, 72(4), 271-280. https://doi.org/10.1515/auto-2023-0122
- Kißkalt, J., Michalka, A., Strohmeyer, C., Horn, M., & Graichen, K. (2024). Fault detection in gauge-sensorized strain wave gears. In Proceedings of the European Control Conference (pp. 26-33). Stockholm (Sweden).
- Kögler, P., Dahlmann, J., & Graichen, K. (2024). Side-Slip Compensation in Model Predictive Path Following Control for General-n-Trailer Systems. In Proceedings of the 28th International Conference on System Theory, Control and Computing (ICSTCC). Sinaia, Romania.
- Lukassek, M., Dahlmann, J., Völz, A., & Graichen, K. (2024). Model predictive path-following control for truck–trailer systems with specific guidance points - Design and experimental validation. Mechatronics, 100, 103190. https://doi.org/10.1016/j.mechatronics.2024.103190
- Löhe, K., Reinhard, J., Petrasch, N., Kallabis, S., Graichen, K., & Mucha, M. (2024). Work Roll Speed Drop Compensation for Hot Strip Mills Reduces Drivetrain Wear and Increases Strip Quality. In AISTech 2024 — Proceedings of the Iron & Steel Technology Conference (pp. 1212-1223). Columbus, OH, US: Warrendale, PA: Association for Iron and Steel Technology.
- Pierer von Esch, M., Landgraf, D., Steffel, M., Völz, A., & Graichen, K. (2024). Distributed Stochastic Optimal Control of Nonlinear Systems based on ADMM. IEEE Control Systems Letters, 8, 424-429. https://doi.org/10.1109/LCSYS.2024.3393411
- Pierer von Esch, M., Völz, A., & Graichen, K. (2024). Asynchronous ADMM for Nonlinear Continuous-Time Systems. Optimal Control Applications & Methods.
- Pierer von Esch, M., Völz, A., & Graichen, K. (2024). Sensitivity-Based Distributed Model Predictive Control: Synchronous and Asynchronous Execution Compared to ADMM. At-Automatisierungstechnik, 72(2), 91-106. https://doi.org/10.1515/auto-2023-0050
- Rabenstein, G., Ullrich, L., & Graichen, K. (2024). Sampling for model predictive trajectory planning in autonomous driving using normalizing flows. In Proc. 35th IEEE Intelligent Vehicles Symposium (IEEE IV 2024) (pp. 2091-2096). Jeju Island (Korea).
- Reinhard, J., Löhe, K., & Graichen, K. (2024). Optimal dynamic current control for externally excited synchronous machines. In Proceedings of the 2024 IEEE Conference on Control Technology and Applications (CCTA) (pp. 146-152). Newcastle upon Tyne, UK.
- Reinhard, J., Löhe, K., Petrasch, N., Kallabis, S., & Graichen, K. (2024). Dynamic compensation of the threading speed drop in rolling processes. Journal of Process Control, 137, 103197. https://doi.org/10.1016/j.jprocont.2024.103197
- Schumann, M., & Graichen, K. (2024). PINN-based dynamical modeling and state estimation in power inverters. In Proceedings of the 2024 IEEE Conference on Control Technology and Applications (CCTA). Newcastle upon Tyne, UK.
- Snobar, F., Michalka, A., Horn, M., Strohmeyer, C., & Graichen, K. (2024). Sensitivity-based moving horizon estimation of road friction. In Proceedings of the European Control Conference (pp. 718-724). Stockholm (Sweden).
- Südhoff, T., Ebner, L., Schmidt, J., & Graichen, K. (2024). GP-based modeling for PSD control of emulsification processes. In Proceedings of the 28th International Conference on System Theory, Control and Computing (ICSTCC). Sinaia, Romania.
- Tang, Y., & Moor, T. (2024). Compositional non-blockingness verification of finite automata with prioritised events. Discrete Event Dynamic Systems: Theory and Applications. https://doi.org/10.1007/s10626-024-00394-2
- Ullrich, L., Buchholz, M., Dietmayer, K., & Graichen, K. (2024). AI safety assurance for automated vehicles: A survey on research, standardization, regulation. IEEE Transactions on Intelligent Vehicles. https://doi.org/10.1109/TIV.2024.3496797
- Ullrich, L., McMaster, A., & Graichen, K. (2024). Transfer learning study of motion transformer based trajectory predictions. In Proc. 35th IEEE Intelligent Vehicles Symposium (IEEE IV 2024) (pp. 110-117). Jeju Island (Korea).
- Verhoolen, A., Geißelbrecht, M., Kadar, J., Preuster, P., Wasserscheid, P., & Graichen, K. (2024). Bayesian optimization of operating points of a continuous perhydro-dibenzyltoluene dehydrogenation reactor. International Journal of Energy Research. https://doi.org/10.1155/2024/5627453
- Wietzke, T., Gall, J., & Graichen, K. (2024). Occupancy Prediction for Building Energy Systems with Latent Force Models. Energy and Buildings, 113968. https://doi.org/10.1016/j.enbuild.2024.113968
- Dio, M., Demir, O., Trachte, A., & Graichen, K. (2023). Safe active learning and probabilistic design of experiment for autonomous hydraulic excavators. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 9685-9690). Detroit, US.
- Dio, M., Völz, A., & Graichen, K. (2023). Cooperative dual-arm control for heavy object manipulation based on hierarchical quadratic programming. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 643-648). Detroit, US.
- Frank, R., Wittmann, L.-M., Kleffel, T., Roth, B., Graichen, K., & Drummer, D. (2023). Investigating the Integration of Nonwoven Carbon Fibers for Mechanical Enhancement in Compression Molded Fiber-Reinforced Polymer Bipolar Plates. Polymers, 15(19). https://doi.org/10.3390/polym15193891
- Geiling, J., Wagner, L., Auer, F., Ortner, F., Nuß, A., Seyfried, R.,... Preuster, P. (2023). Operational experience with a liquid organic hydrogen carrier (LOHC) system for bidirectional storage of electrical energy over 725 h. Journal of Energy Storage, 72. https://doi.org/10.1016/j.est.2023.108478
- Gold, T., Völz, A., & Graichen, K. (2023). Model predictive interaction control for robotic manipulation tasks. IEEE Transactions on Robotics, 39(1), 76-89. https://doi.org/10.1109/TRO.2022.3196607
- Harder, K., Niemeyer, J., Remele, J., & Graichen, K. (2023). Hierarchical model predictive control for an off-highway Diesel engine with SCR catalyst. International Journal of Engine Research. https://doi.org/10.1177/14680874221143600
- Hippe, P. (2023). Simplified MIMO design of observer-based PI control in view of input saturation. At-Automatisierungstechnik, 71(3), 179-186. https://doi.org/10.1515/auto-2022-0065
- Hippe, P. (2023). Time domain design of PI-C controllers Zeitbereichsentwurf von PI-C-Reglern. At-Automatisierungstechnik, 71(6), 467-475. https://doi.org/10.1515/auto-2022-0142
- Hoffmann, M., Braun, S., Sura, O., Stelzig, M., Schüßler, C., Graichen, K., & Vossiek, M. (2023). Concept for an Automatic Annotation of Automotive Radar Data Using AI-segmented Aerial Camera Images. In Proceedings of the IEEE Radar Conference. Sydney, NSW, AU: Institute of Electrical and Electronics Engineers Inc..
- Jalilian, A., Schwarz, N., Völz, A., & Ritschel, R. (2023). Cascaded Disturbance Compensation for MPC-based Autonomous Vehicle Guidance. In 2023 31st Mediterranean Conference on Control and Automation, MED 2023 (pp. 932-937). Limassol, CYP: Institute of Electrical and Electronics Engineers Inc..
- Kißkalt, J., Michalka, A., Strohmeyer, C., Horn, M., & Graichen, K. (2023). Simulation chain for sensorized strain wave gears. In Proc. 27th International Conference on System Theory, Control and Computing (ICSTCC) (pp. 467 - 473). Timisoara (Romania).
- Landgraf, D., Völz, A., Berkel, F., Schmidt, K., Specker, T., & Graichen, K. (2023). Probabilistic prediction methods for nonlinear systems with application to stochastic model predictive control. Annual Reviews in Control, 56, 100905. https://doi.org/10.1016/j.arcontrol.2023.100905
- Rheinfels, T., Gaukler, M., & Ulbrich, P. (2023). A New Perspective on Criticality: Efficient State Abstraction and Run-Time Monitoring of Mixed-Criticality Real-Time Control Systems (Artifact). Dagstuhl, Germany: Schloss Dagstuhl -- Leibniz-Zentrum für Informatik.
- Rheinfels, T., Gaukler, M., & Ulbrich, P. (2023). A New Perspective on Criticality: Efficient State Abstraction and Run-Time Monitoring of Mixed-Criticality Real-Time Control Systems. In Papadopoulos, Alessandro V. (Eds.), 35th Euromicro Conference on Real-Time Systems (ECRTS 2023) (pp. 11:1-11:26). Vienna, AT: Dagstuhl, Germany: Schloss Dagstuhl -- Leibniz-Zentrum für Informatik.
- Rohrmüller, M., Beckerle, P., Graichen, K., Malvezzi, M., & Pozzi, M. (2023). In-Hand Manipulation with Synergistic Actuated Robotic Hands: An MPC-Based Approach. In 2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids). Austin, TX, US: IEEE Computer Society.
- Schumann, M., Ebersberger, S., & Graichen, K. (2023). Improved nonlinear estimation in thermal networks using machine learning. In Proc. IEEE International Conference on Mechatronics (ICM 2023, accepted). Loughborough (UK).
- Schumann, M., Ebersberger, S., & Graichen, K. (2023). Online learning and adaptation of nonlinear thermal networks for power inverters. In Proceedings of the 49th Annual Conference of the IEEE Industrial Electronics Society (IECON 2023). Marina Bay Sands (Singapore).
- Snobar, F., Michalka, A., Horn, M., Strohmeyer, C., & Graichen, K. (2023). Rack force estimation from standstill to high speeds by hybrid model design and blending. In Proceedings of the IEEE International Conference on Mechatronics (ICM 2023). Loughborough (UK).
- Spenger, P., & Graichen, K. (2023). Performance prediction of NMPC algorithms with incomplete optimization. In Proc. 22nd IFAC World Congress (accepted) (pp. 7456-7461). Yokohama, Japan.
- Ullrich, L., Völz, A., & Graichen, K. (2023). Robust meta-learning of vehicle yaw rate dynamics via conditional neural processes. In Proc. 62nd IEEE Conference on Decision and Control (CDC) (pp. 322-327). Marina Bay Sands (Singapore).
- Bergmann, D., Harder, K., Niemeyer, J., & Graichen, K. (2022). Nonlinear MPC of a Heavy-Duty Diesel Engine With Learning Gaussian Process Regression. IEEE Transactions on Control Systems Technology, 30(1), 113-129. https://doi.org/10.1109/TCST.2021.3054650
- Burk, D., Völz, A., & Graichen, K. (2022). A modular framework for distributed model predictive control of nonlinear continuous-time systems (GRAMPC-D). Optimization and Engineering, 23, 771-795. https://doi.org/10.1007/s11081-021-09605-3
- Burk, D., Völz, A., & Graichen, K. (2022). Improving the performance of distributed model predictive control by applying graph partitioning methods. In Proceedings of the 26th International Conference on System Theory, Control and Computing (ICSTCC). Sinaia (Romania).
- Dahlmann, J., Völz, A., Szabo, T., & Graichen, K. (2022). A Numerical Approach for Solving the Inversion Problem for n-Trailer Systems. In 2022 American Control Conference (ACC) (pp. 2018-2024). Atlanta, GA, US: Institute of Electrical and Electronics Engineers Inc..
- Dahlmann, J., Völz, A., Szabo, T., & Graichen, K. (2022). Trajectory optimization for truck-trailer systems based on predictive path-following control. In Proceedings of the 6th IEEE Conference on Control Technology and Applications (CCTA). Trieste (Italy).
- Gold, T., Römer, R., Völz, A., & Graichen, K. (2022). Catching objects with a robot arm using model predictive control. In Proceedings 2022 American Control Conference (ACC) (pp. 1915-1920). Atlanta, GA (USA).
- Goller, T., Gold, T., Völz, A., & Graichen, K. (2022). Model predictive interaction control based on a path-following formulation. In Proceedings IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 551-556). Guilin (China).
- Graichen, K., & Görges, D. (2022). Ausgewählte Beiträge des GMA Fachausschusses 1.50 .,Grundlagen vernetzter Systeme". At-Automatisierungstechnik, 70(4), 315-316. https://doi.org/10.1515/auto-2022-0033
- Huber, H., Burk, D., & Graichen, K. (2022). Comparison of sensitivity-based and ADMM-based DMPC applied to building automation. In Proceedings of the 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 546-553). Trieste (Italy).
- Kerschbaum, S., & Deutscher, J. (2022). Bilateral backstepping control of coupled linear parabolic PDEs with spatially varying coefficients. Automatica, 135. https://dx.doi.org/10.1016/j.automatica.2021.109923
- Kowalewski, J., Lorenz, A., Lomakin, A., Alvarez, R., & Graichen, K. (2022). Circulating current control and energy balancing of a modular multilevel converter using model predictive control for HVDC applications. In Proceedings of the 48th Annual Conference of the IEEE Industrial Electronics Society (IECON 2022). Brussels (BE).
- Lamprecht, A., Steffen, D., Nagel, K., Häcker, J., & Graichen, K. (2022). Online Model Predictive Motion Cueing With Real-Time Driver Prediction. IEEE Transactions on Intelligent Transportation Systems, 23(8), 12414-12428. https://doi.org/10.1109/tits.2021.3114003
- Landgraf, D., Völz, A., & Graichen, K. (2022). Nonlinear model predictive control with latent force models. In Proceedings 2022 American Control Conference (ACC) (pp. 4979-4984). Atlanta, GA (USA).
- Landgraf, D., Völz, A., Kontes, G., Graichen, K., & Mutschler, C. (2022). Hierarchical learning for model predictive collision avoidance. In IFAC PapersOnLine (pp. 355-360). Vienna (Austria).
- Lübke, M., Su, Y., Cherian, A.J., Fuchs, J., Dubey, A., Weigel, R., & Franchi, N. (2022). Full Physical Layer Simulation Tool to Design Future 77 GHz JCRS-Applications. IEEE Access. https://doi.org/10.1109/ACCESS.2022.3170919
- Makowicki, T., Bitzer, M., & Graichen, K. (2022). Cycle-by-Cycle Combustion Optimisation: Calibration of Data-based Models and Improvements of Computational Efficiency. Mathematical and Computer Modelling of Dynamical Systems, (accepted). https://doi.org/10.1080/13873954.2022.2052111
- Rabenstein, G., Demir, O., Trachte, A., & Graichen, K. (2022). Data-driven feed-forward control of hydraulic cylinders using Gaussian process regression for excavator assistance functions. In Proceedings of the 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 962-969). Trieste (Italy).
- Reinhard, J., Löhe, K., & Graichen, K. (2022). Optimal current setpoint computation for externally excited synchronous machines. In Proceedings of the 6th IEEE Conference on Control Technology and Applications (CCTA) (pp. 1319-1326). 6th IEEE Conference on Control Technology and Applications (CCTA).
- Schumann, M., Ebersberger, S., & Graichen, K. (2022). Dynamic and stationary state estimation of fluid cooled three-phase inverters. In Proceedings of the 26th IEEE International Symposium on Power Electronics, Electrical Drives Automation and Motion (SPEEDAM 2022). Sorrento (Italy).
- Snobar, F., Reinhard, J., Huber, H., Hoffmann, M., Stelzig, M., Vossiek, M., & Graichen, K. (2022). FOV-based model predictive object tracking for quadcopters. In Proceedings of the 9th IFAC Symposium on Mechatronic Systems (Mechatronics 2022) (pp. 13 - 18). Los Angeles, CA (USA).
- Stecher, J., Kiltz, L., & Graichen, K. (2022). Semi-infinite programming using Gaussian process regression for robust design optimization. In Proceedings European Control Conference (pp. 52-59). London (UK).
- Tang, Y., & Moor, T. (2022). Compositional Verification of Non-Blockingness with Prioritised Events. In IFAC PAPERSONLINE (pp. 236-243). Prague, CZ: AMSTERDAM: ELSEVIER.
- Triska, L., & Moor, T. (2022). Abstraction Based Supervisory Control for Non-Regular ∗-Languages. In Proceedings of the 16th IFAC Workshop on Discrete Event Systems. Prag, CZ.
- Burk, D., Völz, A., & Graichen, K. (2021). Experimental validation of the open-source DMPC framework GRAMPC-D applied to the remote-accessible robotarium. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA).
- Burk, D., Völz, A., & Graichen, K. (2021). Towards asynchronous ADMM for distributed model predictive control of nonlinear systems. In Proceedings European Control Conference (ECC 2021) (pp. 1950-1955).
- Gold, T., Rohrmüller, M., Völz, A., & Graichen, K. (2021). Model predictive interaction control for force closure grasping. In Proceedings of the 2021 IEEE Conference on Decision and Control (CDC) (pp. 1018-1023). Austin, TX, USA.
- Hippe, P. (2021). An alternative method for windup prevention. At-Automatisierungstechnik, 69(9), 750-758. https://doi.org/10.1515/auto-2021-0051
- Hippe, P. (2021). Prevention of Windup Caused by Saturating Sensors (Approach with Saturation Indicator). In SpringerBriefs in Applied Sciences and Technology. (pp. 1-15). Springer Science and Business Media Deutschland GmbH.
- Hippe, P. (2021). Prevention of Windup Caused by Saturating Sensors (Compensating Approach). In SpringerBriefs in Applied Sciences and Technology. (pp. 29-48). Springer Science and Business Media Deutschland GmbH.
- Hippe, P. (2021). Windup Prevention in the Joint Presence of Input and Output Saturation—The MIMO Case. In SpringerBriefs in Applied Sciences and Technology. (pp. 61-90). Springer Science and Business Media Deutschland GmbH.
- Huber, H., & Graichen, K. (2021). A sensitivity-based distributed model predictive control algorithm for nonlinear continuous-time systems. In 5th IEEE Conference on Control Technology and Applications (CCTA) (pp. (accepted)).
- Lamprecht, A., Emmert, T., & Graichen, K. (2021). Learning-based driver prediction for MPC-based motion cueing algorithms. In Driving Simulation Conference Europe 2021 (DSC) (pp. 133 - 140).
- Lamprecht, A., Steffen, D., Häcker, J., & Graichen, K. (2021). Potential der modellprädiktiven Regelung für Fahrsimulatoren. At-Automatisierungstechnik, 69(2), 155-170. https://doi.org/10.1515/auto-2020-0090
- Lomakin, A., & Deutscher, J. (2021). Algebraic detection and identification of parameter faults for robots. At-Automatisierungstechnik, 69(8), 645-655. https://doi.org/10.1515/auto-2021-0045
- Lukassek, M., Völz, A., Szabo, T., & Graichen, K. (2021). Model predictive path-following control for general n-trailer systems with an arbitrary guidance point. In Proceedings European Control Conference (ECC 2021) (pp. 1329-1334).
- Tang, Y., & Moor, T. (2021). Compositional Verification of Finite Automata under Event Preemption. In 2021 60TH IEEE CONFERENCE ON DECISION AND CONTROL (CDC) (pp. 301-308). , ELECTR NETWORK: NEW YORK: IEEE.
- Triska, L., & Moor, T. (2021). Behaviour equivalent max-plus automata for timed petri nets under open-loop race-policy semantics. Discrete Event Dynamic Systems: Theory and Applications, Topical Collection on Control 2022. https://doi.org/10.1007/s10626-021-00346-0
- Triska, L., Portella, J., & Reger, J. (2021). Dynamic Extension for Adaptive Backstepping Control of Uncertain Pure-Feedback Systems. In IFAC PAPERSONLINE (pp. 307-312). Tokyo, JAPAN: AMSTERDAM: ELSEVIER.
- Völz, A., & Graichen, K. (2021). Gradient-based nonlinear model predictive control for systems with state-dependent mass matrix. In Proceedings of the 2021 IEEE Conference on Decision and Control (CDC), accepted.
- Wang, X., Li, Z., & Wonham, W.M. (2021). Real-Time Scheduling Based on Nonblocking Supervisory Control of State-Tree Structures. IEEETransactions on Automatic Control, 66(9), 4230-4237. https://doi.org/10.1109/TAC.2020.3031023
- Bergmann, D., & Graichen, K. (2020). Safe Bayesian Optimization under Unknown Constraints. In 59th IEEE Conference on Decision and Control (CDC 2020) (pp. 3592-3597). Institute of Electrical and Electronics Engineers Inc..
- Burk, D., Völz, A., & Graichen, K. (2020). Distributed optimization with ALADIN for non-convex optimal control problems. In 59th IEEE Conference on Decision and Control (CDC 2020).
- Burk, D., Völz, A., & Graichen, K. (2020). Neighbor approximations for distributed optimal control of nonlinear networked systems. In Proceedings of the European Control Conference (ECC 2020) (pp. 1238-1243).
- Deutscher, J., & Kerschbaum, S. (2020). Robust output regulation by state feedback control for coupled linear parabolic PIDEs. IEEE Transactions on Automatic Control, 65, 2207-2214. https://doi.org/10.1109/TAC.2019.2938329
- Englert, T., & Graichen, K. (2020). Nonlinear model predictive torque control and setpoint computation of induction machines for high performance applications. Control Engineering Practice, 99. https://doi.org/10.1016/j.conengprac.2020.104415
- Fischer, F., & Deutscher, J. (2020). Flatness-based algebraic fault diagnosis for distributed-parameter systems. Automatica, 117, 108987. https://doi.org/10.1016/j.automatica.2020.108987
- Fischer, F., & Deutscher, J. (2020). Flatness-based algebraic fault identification for a wave equation with dynamic boundary conditions. In Proceedings of the IFAC World Congress (accepted). Berlin, DE.
- Gaukler, M. (2020). Analysis of Real-Time Control Systems using First-Order Continuization. In Goran Frehse and Matthias Althoff (Eds.), ARCH20 (EPiC Series in Computing, vol. 74) (pp. 209-241).
- Gaukler, M., Roppenecker, G., & Ulbrich, P. (2020). Details and Proofs for: Stability Analysis of Multivariable Digital Control Systems with Uncertain Timing.
- Gaukler, M., Roppenecker, G., & Ulbrich, P. (2020). Stability Analysis of Multivariable Digital Control Systems with Uncertain Timing. In IFAC-PapersOnLine (pp. 3085-3091).
- Geiselhart, R., Bergmann, D., Niemeyer, J., Remele, J., & Graichen, K. (2020). Hierarchical Predictive Control of a Combined Engine/Selective Catalytic Reduction System with Limited Model Knowledge. SAE International Journal of Engines, 13(2), 211-222. https://doi.org/10.4271/03-13-02-0015
- Gold, T., Lomakin, A., Goller, T., Völz, A., & Graichen, K. (2020). Towards a Generic Manipulation Framework for Robots based on Model Predictive Interaction Control. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA) (pp. 401 - 407). Beijing, CN.
- Gold, T., Völz, A., & Graichen, K. (2020). Model Predictive Interaction Control for Industrial Robots. In Proceedings of the 21st IFAC World Congress (pp. 10026 - 10033). Berlin, DE.
- Gold, T., Völz, A., & Graichen, K. (2020). Model Predictive Position and Force Trajectory Tracking Control for Robot-Environment Interaction. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 7397-7402). Las Vegas, NV, USA, US.
- Jemaa, K., Kotman, P., Reimann, S., & Graichen, K. (2020). Tube-based internal model control of minimum-phase input-affine MIMO systems under input constraints. In Proceedings of the 21st IFAC World Congress.
- Joos, S., Trachte, A., Bitzer, M., & Graichen, K. (2020). Constrained real-time control of hydromechanical powertrains - methodology and practical application. Mechatronics, 71. https://doi.org/10.1016/j.mechatronics.2020.102397
- Kruse, T., & Graichen, K. (2020). Moving horizon estimation for continuous glucose monitoring. In Proceedings of the 7th International Conference on Biomedical Engineering and Systems (ICBES 20).
- Lomakin, A., & Deutscher, J. (2020). Algebraic fault detection and identification for rigid robots. In Proceedings of the International Conference on Robotics and Automation (ICRA) (pp. 9352-9358). Paris, FR.
- Lomakin, A., & Deutscher, J. (2020). Fault detection and identification for nonlinear MIMO systems using derivative estimation. In Proceedings of the 21st world congress of the international federation of automatic control (pp. 676-681). Berlin, DE.
- Lomakin, A., & Deutscher, J. (2020). Identification of Dynamic Parameters for Rigid Robots Based on Polynomial Approximation. In Proceedings of the International Conference on Intelligent Robots and Systems (IROS), (accepted). Las Vegas, US.
- Lomakin, A., Mayr, A., Graichen, K., & Franke, J. (2020). Optimization of direct winding processes based on a holistic control approach. In Proceedings of the Electric Drives Production Conference (E-DPC). Ludwigsburg (D).
- Lukassek, M., Völz, A., Szabo, T., & Graichen, K. (2020). Model predictive control for agricultural machines with implements. In Proceedings 28th Mediterranean Conference on Control and Automation (MED) (pp. 387-392).
- Mayr, A., Kißkalt, D., Lomakin, A., Graichen, K., & Franke, J. (2020). Towards an intelligent linear winding process through sensor integration and machine learning techniques. In Proceedings of the 8th CIRP Global Web Conference – Flexible Mass Customisation (CIRPe 2020).
- Mesmer, F., Szabo, T., & Graichen, K. (2020). Learning feedforward control of a hydraulic clutch actuation path based on policy gradients. In 59th IEEE Conference on Decision and Control (CDC 2020).
- Moor, T., Schmidt, K.W., & Schmuck, A.-K. (2020). An Efficient Algorithm for the Computation of the Controllability Prefix of (*)-Languages. In IFAC PAPERSONLINE (pp. 2122-2129). AMSTERDAM: ELSEVIER.
- Schmuck, A.-K., Moor, T., & Schmidt, K.W. (2020). A Reactive Synthesis Approach to Supervisory Control of Terminating Processes. In IFAC PAPERSONLINE (pp. 2149-2156). AMSTERDAM: ELSEVIER.
- Triska, L., & Moor, T. (2020). Behaviour Equivalent Max-Plus Automata for a Class of Timed Petri Nets. In 15th IFAC Workshop on Discrete Event Systems. Rio de Janeiro, BR.
- Völz, A., & Graichen, K. (2020). Prädiktive Pfadfolgeregelung für die kollisionsfreie Bewegungsplanung von Robotern. At-Automatisierungstechnik, 68(7), 557-570. https://doi.org/10.1515/auto-2020-0048
- Wang, D., Wang, X., & Li, Z. (2020). Nonblocking Supervisory Control of State-Tree Structures With Conditional-Preemption Matrices. IEEE Transactions on Industrial Informatics, 16(6), 3744-3756. https://doi.org/10.1109/TII.2019.2939628
- Wang, D., Wang, X., & Li, Z. (2020). State-based fault diagnosis of discrete-event systems with partially observable outputs. Information Sciences, 529, 87-100. https://doi.org/10.1016/j.ins.2020.04.027
- Wang, X., Moor, T., & Li, Z. (2020). Top-Down Nested Supervisory Control of State-Tree Structures Based on State Aggregations. In IFAC PAPERSONLINE (pp. 11175-11180). AMSTERDAM: ELSEVIER.
- Yang, J.-M., Moor, T., & Raisch, J. (2020). Refinements of behavioural abstractions for the supervisory control of hybrid systems. Discrete Event Dynamic Systems-Theory and Applications. https://doi.org/10.1007/s10626-020-00315-z
- Bergmann, D., Geiselhart, R., & Graichen, K. (2019). Modelling and control of a heavy-duty Diesel engine gas path with Gaussian process regression. In Proc. European Control Conference (ECC 2019) (pp. 1207-1213). Naples (Italy).
- Bergmann, D., & Graichen, K. (2019). Gaußprozessregression zur Modellierung zeitvarianter Systeme. At-Automatisierungstechnik, 67(8), 637-647. https://doi.org/10.1515/auto-2019-0015
- Bestler, A., & Graichen, K. (2019). Distributed model predictive control for continuous-time nonlinear systems based on suboptimal ADMM. Optimal Control Applications & Methods, 40(1), 1-23. https://doi.org/10.1002/oca.2459
- Burk, D., Völz, A., & Graichen, K. (2019). Towards a modular framework for distributed model predictive control of nonlinear neighbor-affine systems. In 58th IEEE Conference on Decision and Control (CDC 2019) (pp. 5279-5284). Nice (France).
- Deutscher, J., & Gabriel, J. (2019). Fredholm backstepping control of coupled linear parabolic PDEs with input and output delays. IEEE Transactions on Automatic Control, (in press). https://doi.org/10.1109/TAC.2019.2945035
- Deutscher, J., & Gabriel, J. (2019). Minimum time output regulation for general linear heterodirectional hyperbolic systems. International Journal of Control, (in press). https://doi.org/10.1080/00207179.2018.1533648
- Deutscher, J., & Gabriel, J. (2019). Periodic output regulation for general linear heterodirectional hyperbolic systems. Automatica, 103, 208-216. https://doi.org/10.1016/j.automatica.2019.02.006
- Deutscher, J., Gehring, N., & Kern, R. (2019). Output feedback control of general linear heterodirectional hyperbolic PDE-ODE systems with spatially-varying coefficients. International Journal of Control, 92, 2274-2290. https://doi.org/10.1080/00207179.2018.1436770
- Deutscher, J., & Kerschbaum, S. (2019). Output regulation for coupled linear parabolic PIDEs. Automatica, 100, 360-370. https://doi.org/10.1016/j.automatica.2018.11.033
- Englert, T., Völz, A., Mesmer, F., Rhein, S., & Graichen, K. (2019). A software framework for embedded nonlinear model predictive control using a gradient-based augmented Lagrangian approach (GRAMPC). Optimization and Engineering, 20(3), 769-809. https://doi.org/10.1007/s11081-018-9417-2
- Fischer, F., & Deutscher, J. (2019). Flachheitsbasierte algebraische Fehlerdiagnose für einen Euler-Bernoulli-Balken mittels Modulationsfunktionen. At-Automatisierungstechnik, 67, 622-636. https://doi.org/10.1515/auto-2019-0035
- Gaukler, M., Rheinfels, T., Ulbrich, P., & Roppenecker, G. (2019). Convergence Rate Abstractions for Weakly-Hard Real-Time Control.
- Gaukler, M., & Ulbrich, P. (2019). Worst-Case Analysis of Digital Control Loops with Uncertain Input/Output Timing. In Proceedings of the 6th International Workshop on Applied Verification of Continuous and Hybrid Systems (ARCH '19)..
- Geiselhart, R., Bergmann, D., Niemeyer, J., Remele, J., & Graichen, K. (2019). Hierarchical optimization of operational costs of a heavy-duty diesel engine and an exhaust aftertreatment system. In Proc. European Control Conference (ECC 2019) (pp. 1227-1232). Naples (Italy).
- Gold, T., Völz, A., & Graichen, K. (2019). External torque estimation for an industrial robot arm using joint torsion and motor current measurements. In Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS) and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS) (pp. 879-884). Vienna (Austria).
- Graichen, K., & Quevedo, D. (2019). Ausgewählte Beiträge des GMA-Fachausschusses 1.50 "Grundlagen vernetzter Systeme". At-Automatisierungstechnik, 67(12), 988-989. https://doi.org/10.1515/auto-2019-0121
- Gu, C., Wang, X., & Li, Z. (2019). Synthesis of Supervisory Control With Partial Observation on Normal State-Tree Structures. IEEE Transactions on Automation Science and Engineering, 16(2), 984-997. https://doi.org/10.1109/TASE.2018.2880178
- Hiller, M., Qiu, C., Particke, F., Hofmann, C., & Thielecke, J. (2019). Learning Topometric Semantic Maps from Occupancy Grids. In 2019 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS (IROS) (pp. 4190-4197). Macau, PEOPLES R CHINA: NEW YORK: IEEE.
- Hofmann, C., Particke, F., Hiller, M., & Thielecke, J. (2019). Object detection, classification and localization by infrastructural stereo cameras. In Andreas Kerren, Christophe Hurter, Jose Braz (Eds.), VISIGRAPP 2019 - Proceedings of the 14th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (pp. 808-815). Prague, CZ: SciTePress.
- Jemaa, K., Kotman, P., Reimann, S., & Graichen, K. (2019). Tube-based internal model control of differentially flat input-affine SISO systems under input constraints. In Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS) and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS) (pp. 158-163). Vienna (Austria).
- Joos, S., Bitzer, M., Karrelmeyer, R., & Graichen, K. (2019). Constrained online trajectory planning for flat SISO systems using a switched state variable filter. Automatica, (accepted). https://doi.org/10.1016/j.automatica.2019.108583
- Joos, S., Bitzer, M., Karrelmeyer, R., & Graichen, K. (2019). Constrained online trajectory planning for nonlinear flat SISO systems using a switched state variable filter. Automatica, 110. https://doi.org/10.1016/j.automatica.2019.108583
- Joos, S., Bruder, R., Specker, T., Bitzer, M., & Graichen, K. (2019). Echtzeitfähige Trajektoriengenerierung für hochautomatisierte und autonome Fahrzeuge bei Zustands und Stellgrößenbeschränkungen. In VDI Berichte (pp. 285-293). Mannheim, DEU: VDI Verlag GMBH.
- Joos, S., Bruder, R., Specker, T., Bitzer, M., & Graichen, K. (2019). Kinematic real-time trajectory planning with state and input constraints for the example of highly automated driving. In Proc. 23rd International Conference on System Theory, Control and Computing (ICSTCC 2019) (pp. 779-784).
- Joos, S., Trachte, A., Bitzer, M., & Graichen, K. (2019). Constrained real-time swivel angle control for hydraulic axial piston motors. In Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS) and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS)} (pp. 1433-1438). Vienna (Austria).
- Kerschbaum, S., & Deutscher, J. (2019). Backstepping control of coupled linear parabolic PDEs with space and time dependent coefficients. IEEE Transactions on Automatic Control, (in press). https://doi.org/10.1109/TAC.2019.2944918
- Lamprecht, A., Steffen, D., Häcker, J., & Graichen, K. (2019). Comparison between a Filter- and an MPC-based MCA in an Offline Simulator Study. In Proceedings of the Driving Simulation Conference & Exhibition (DSC) (pp. 101-107). Strasbourg, FR.
- Lamprecht, A., Steffen, D., Häcker, J., & Graichen, K. (2019). Optimal control based reference generation for model predictive motion cueing algorithms. In 3rd IEEE Conference on Control Technology and Application (CCTA 2019) (pp. 203-208). Hong Kong (China).
- Mesmer, F., Szabo, T., & Graichen, K. (2019). Feedforward control of a hydraulic clutch actuation path. In Proc. European Control Conference (ECC 2019) (pp. 620-626). Naples (Italy).
- Mesmer, F., Szabo, T., & Graichen, K. (2019). Learning methods for the feedforward control of a hydraulic clutch actuation path. In Proc. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2019) (pp. 733-738). Hong Kong (China).
- Popp, J., & Deutscher, J. (2019). Optimizing a Hybrid Diesel Power Unit Using Extremum-Seeking Control. IEEE Transactions on Control Systems Technology, 27, 2068-2084. https://doi.org/10.1109/TCST.2018.2848636
- Reger, J., & Triska, L. (2019). Dynamic Extensions for Exact Backstepping Control of Systems in Pure Feedback Form. In 58th IEEE Conference on Decision and Control (CDC 2019). Nice, FR.
- Schmuck, A.-K., Moor, T., & Majumdar, R. (2019). On the relation between reactive synthesis and supervisory control of non-terminating processes. Discrete Event Dynamic Systems-Theory and Applications. https://doi.org/10.1007/s10626-019-00299-5
- Ulbrich, P., & Gaukler, M. (2019, April). QRONOS: Towards Quality-aware Responsive Real-Time Control Systems. Poster presentation at 25th IEEE Real-Time and Embedded Technology and Applications Symposium, Brief Presentations Track, Montreal, Quebec, CA.
- Völz, A., & Graichen, K. (2019). A predictive path-following controller for continuous replanning with dynamic roadmaps. IEEE Robotics and Automation Letters, 4(4), 3963-3970. https://doi.org/10.1109/LRA.2019.2929990
- Wang, X., Li, Z., & Moor, T. (2019). SCT-based priority-free conditionally-preemptive scheduling of modular real-time systems with exact task execution time. Discrete Event Dynamic Systems-Theory and Applications. https://doi.org/10.1007/s10626-019-00288-8
- Bai, X. (2018). Verification of Eventuality Properties for Discrete-time Affine Systems. In 2018 IEEE CONFERENCE ON DECISION AND CONTROL (CDC) (pp. 1560-1565). Miami Beach, FL, US: NEW YORK: IEEE.
- Deutscher, J., & Gabriel, J. (2018). Robust State Feedback Regulator Design for General Linear Heterodirectional Hyperbolic Systems. IEEE Transactions on Automatic Control, 63, 2620-2627. https://doi.org/10.1109/TAC.2018.2791524
- Deutscher, J., Gehring, N., & Kern, R. (2018). Output feedback control of general linear heterodirectional hyperbolic ODE-PDE-ODE systems. Automatica, 95, 472-480. https://doi.org/10.1016/j.automatica.2018.06.021
- Deutscher, J., & Kerschbaum, S. (2018). Backstepping Control of Coupled Linear Parabolic PIDEs with Spatially-Varying Coefficients. IEEE Transactions on Automatic Control, 63, 4218-4233. https://doi.org/10.1109/TAC.2018.2802422
- Deutscher, J., & Kerschbaum, S. (2018). Backstepping für gekoppelte parabolische Systeme mit ortsabhängigen Koeffizienten. At-Automatisierungstechnik, 66(7), 558-572. https://doi.org/10.1515/auto-2018-0012
- Englert, T., & Graichen, K. (2018). A fixed-point iteration scheme for model predictive torque control of PMSMs. In Proceedings 6th IFAC Conference on Nonlinear Model Predictive Control (NMPC) (pp. 668-673). Madison, WI (USA).
- Fischer, F., & Deutscher, J. (2018). Modulating Function Based Fault Detection for Parabolic Systems with Polynomial Faults. IFAC-PapersOnLine, 51(24), 359-366. https://doi.org/10.1016/j.ifacol.2018.09.602
- Fischer, F., Deutscher, J., & Laleg-Kirati, M. (2018). Source estimation for first order time-varying hyperbolic systems. In Proceedings of the MTNS 2018 (pp. 78-84). Hong Kong, HK.
- Gabriel, J., & Deutscher, J. (2018). State Feedback Regulator Design for Coupled Linear Wave Equations. In Proceedings of the 16th European Control Conference, ECC 2018 (pp. 3013-3018). Institute of Electrical and Electronics Engineers Inc..
- Gaukler, M., Michalka, A., Ulbrich, P., & Klaus, T. (2018). A New Perspective on Quality Evaluation for Control Systems with Stochastic Timing. In Proceedings of the 21st International Conference on Hybrid Systems: Computation and Control (HSCC '18) (pp. 91-100). Porto, Portugal, PT: New York, NY, USA: ACM Press.
- Harder, K., Buchholz, M., Späder, T., & Graichen, K. (2018). A real-time nonlinear air path observer for off-highway diesel engines. In Proceedings 2018 European Control Conference (ECC) (pp. 237-242). Limassol (Cyprus).
- Hiller, M., Particke, F., Hofmann, C., Bey, H., & Thielecke, J. (2018). World Modeling for Mobile Platforms Using a Contextual Object-Based Representation of the Environment. In IEEE (Eds.), Proceedings of the 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER) (pp. 187-191). Tianjin, China.
- Kern, R., Gehring, N., Deutscher, J., & Meißner, M. (2018). Design and Experimental Validation of an Output Feedback Controller for a Pneumatic System with Distributed Parameters. In Proceedings of the Proc. Int. Conf. Control and Systems (ICCAS) 2018 (pp. 1391-1396). YongPyong Resort, KR.
- Lamprecht, A., Häcker, J., & Graichen, K. (2018). Constrained motion cueing for driving simulators using a real-time nonlinear MPC scheme. In Proceedings 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 7466-7471). Madrid (Spain).
- Moor, T., & Götz, S. (2018). Deterministic Finite-Automata Abstractions of Time-Variant Sequential Behaviours. In Proceedings of the Workshop on Discrete Event Systems (pp. 388-393). Elsevier B.V..
- Rhein, S., & Graichen, K. (2018). Constrained trajectory planning and actuator design for electromagnetic heating systems. Control Engineering Practice, 74, 191-203.
- Schmuck, A.-K., Moor, T., & Majumdar, R. (2018). On the Relation between Reactive Synthesis and Supervisory Control of Input/Output Behaviours. In Proceedings of the Workshop on Discrete Event Systems (pp. 31-38). Elsevier B.V..
- Völz, A., & Graichen, K. (2018). An optimization-based approach to dual-arm motion planning with closed kinematics. In Proceedings 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 8346-8351). Madrid (Spain).
- Völz, A., & Graichen, K. (2018). Computation of collision distance and gradient using an automatic sphere approximation of the robot model with bounded error. In Proceedings 50th International Symposium on Robotics (ISR) (pp. 322-329). München (Germany).
- Yang, J.-M., Moor, T., & Raisch, J. (2018). Local Refinement of l-complete Approximations for Supervisory Control of Hybrid Systems. In Proceedings of the Workshop on Discrete Event Systems (pp. 472-479). Elsevier B.V..
- Bai, X., & Moor, T. (2017). Consistent abstractions for the supervision of sequential behaviours. In Proceedings of the 56nd IEEE Conference on Decision and Control.
- Deutscher, J. (2017). Finite-time output regulation for linear 2×2 hyperbolic systems using backstepping. Automatica, 75, 54-62. https://doi.org/10.1016/j.automatica.2016.09.020
- Deutscher, J. (2017). Output regulation for general linear heterodirectional hyperbolic systems with spatially-varying coefficients. Automatica, 85, 34-42. https://doi.org/10.1016/j.automatica.2017.07.027
- Deutscher, J. (2017). Robust output regulation by observer-based feedforward control. International Journal of Systems Science, 48(4), 795-804. https://doi.org/10.1080/00207721.2016.1216198
- Deutscher, J., & Kerschbaum, S. (2017). Backstepping control of coupled diffusion-reaction systems with spatially-varying reaction and Neumann boundary conditions. In Proceedings of the 56th IEEE Annual Conference on Decision and Control, CDC 2017 (pp. 2504-2510). Institute of Electrical and Electronics Engineers Inc..
- Fischer, F., & Deutscher, J. (2017). Fault detection for parabolic systems with distributed inputs and outputs using the modulation function approach. IFAC-PapersOnLine, 50(1), 6774-6779. https://doi.org/10.1016/j.ifacol.2017.08.1195
- Hammer, J., Gaukler, M., Kanzler, P., Hörauf, P., & Novac, D. (2017). FAU FabLab: A Fabrication Laboratory for Scientists, Students, Entrepreneurs and the Curious.
- Meurer, T., Woittennek, F., & Deutscher, J. (2017). Methoden und Anwendungen verteilt-parametrischer Systeme. At-Automatisierungstechnik, 65(5), 295-297. https://doi.org/10.1515/auto-2017-0034
- Moor, T., & Schmidt, K.W. (2017). The controllability prefix for supervisory control under partial observation with an application to fault-tolerant control. In Proceedings of the 20th IFAC World Congress Toulouse.
- Popp, J., & Deutscher, J. (2017). Ein Konzept zur Wirkungsgradoptimierung von Einzylinder-Dieselgeneratoren mittels Optimalsteuerung und Extremum-Seeking. Forschung Im Ingenieurwesen-Engineering Research, 81(4), 421-435. https://doi.org/10.1007/s10010-017-0251-z
- Popp, J., & Deutscher, J. (2017). Optimizing a hybrid diesel power unit using extremum seeking control. IFAC-PapersOnLine, 50(1), 7849-7854. https://doi.org/10.1016/j.ifacol.2017.08.736
- Popp, J., & Deutscher, J. (2017). Wirkungsgradoptimierung eines Einzylinder-Dieselgenerators mittels Optimalsteuerung und Extremum-Seeking. In Proceedings of the Mechatronik 2017. Dresden, DE.
- Völz, A., & Graichen, K. (2017). Composition of dynamic roadmaps for dual-Arm motion planning. In 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM) (pp. 1242-1248). München, DE: Institute of Electrical and Electronics Engineers Inc..
- Baechle, T., Graichen, K., Buchholz, M., & Dietmayer, K. (2016). Loss-focused predictive thermal management of induction motors in electric vehicles using nonlinear fixed-point MPC. In Proceedings 2016 IEEE Multi-Conference on Systems and Control (MSC) (pp. 1392-1397). Buenos Aires (Argentina).
- Deutscher, J. (2016). Backstepping Design of Robust Output Feedback Regulators for Boundary Controlled Parabolic PDEs. IEEE Transactions on Automatic Control, 61(8), 2288-2294. https://doi.org/10.1109/TAC.2015.2491718
- Deutscher, J. (2016). Fault detection for linear distributed-parameter systems using finite-dimensional functional observers. International Journal of Control, 89(3), 550-563. https://doi.org/10.1080/00207179.2015.1086024
- Deutscher, J., & Kerschbaum, S. (2016). Backstepping design of robust state feedback regulators for second order hyperbolic PIDEs. IFAC-PapersOnLine, 49(8), 80-85. https://doi.org/10.1016/j.ifacol.2016.07.422
- Fischer, F., & Deutscher, J. (2016). Algebraic fault detection and isolation for parabolic distributed–parameter systems using modulation functions. IFAC-PapersOnLine, 49(8), 162-167. https://doi.org/10.1016/j.ifacol.2016.07.441
- Kerschbaum, S., & Deutscher, J. (2016). Backstepping-based output regulation for systems with infinite-dimensional actuator and sensor dynamics. Proceedings in Applied Mathematics and Mechanics, 16, 43-46. https://doi.org/10.1002/pamm.201610012
- Klaus, T., Franzmann, F.P., Gaukler, M., Michalka, A., & Ulbrich, P. (2016). Closing the loop: Towards control-aware design of adaptive real-time systems. In Proceedings of the 2016 IEEE Real-Time Systems Symposium, RTSS 2016. Institute of Electrical and Electronics Engineers Inc..
- Klaus, T., Franzmann, F.P., Gaukler, M., Michalka, A., & Ulbrich, P. (2016). Poster Abstract: "Closing the Loop: Towards Control-aware Design of Adaptive Real-Time Systems". Poster presentation at 37th Real-Time Systems Symposium, Porto, Portugal.
- Löhe, K., Zehelein, T., & Roppenecker, G. (2016). Road quality estimation by autoregressive filtering for a two-axle vehicle. At-Automatisierungstechnik, 64(5), 355-364. https://doi.org/10.1515/auto-2016-0012
- Makowicki, T., Bitzer, M., Kotman, P., & Graichen, K. (2016). A combustion cycle model for stationary and transient engine operation. In Proceedings 8th IFAC International Symposium on Advances in Automotive Control (AAC) (pp. 479-485). Kolmården Wildlife Resort (Sweden).
- Moor, T. (2016). A discussion of fault-tolerant supervisory control in terms of formal languages. Annual Reviews in Control, 41(159), 169. https://doi.org/10.1016/j.arcontrol.2016.04.001
- Völz, A., & Graichen, K. (2016). Distance metrics for path planning with dynamic roadmaps. In Proceedings of ISR 2016: 47st International Symposium on Robotics (pp. 126-132). München, DE: Berlin / Offenbach: VDE Verlag.
2015
- Agethen, C., & Moor, T. (2015). A hierarchical and modular control architecture for sequential behaviours. Discrete Event Dynamic Systems: Theory and Applications, 25, 95-124. https://doi.org/10.1007/s10626-014-0182-x
- Bär, W. (2015). Predictive knowledge-based coach tilting control. In Proceedings of the 1999 European Control Conference, ECC 1999 (pp. 2143-2147). Institute of Electrical and Electronics Engineers Inc..
- Deutscher, J. (2015). A backstepping approach to the output regulation of boundary controlled parabolic PDEs. Automatica, 57, 56-64. https://doi.org/10.1016/j.automatica.2015.04.008
- Deutscher, J. (2015). Backstepping design of robust flatness-based tracking controllers for boundary-controlled parabolic PDEs. In Proceedings of the European Control Conference, ECC 2015 (pp. 891-896). Institute of Electrical and Electronics Engineers Inc..
- Deutscher, J. (2015). Backstepping-Entwurf flachheitsbasierter Folgeregler mit robuster asymptotischer Störkompensation für parabolische PDEs. At-Automatisierungstechnik, 63(12), 953-967. https://doi.org/10.1515/auto-2014-1155
- Graichen, K. (2015). Nonlinear MPC with fixed-point iterations: Numerical and experimental validation. IFAC-PapersOnLine, 28(25), 62-67. https://doi.org/10.1016/j.ifacol.2015.11.060
- Graichen, K., & Hentzelt, S. (2015). A bi-level nonlinear predictive control scheme for hopping robots with hip and tail actuation. In Proceedings 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015) (pp. 4480-4485). Hamburg (Germany).
- Hippe, P. (2015). Prevention of windup caused by saturating sensors Windup-Vermeidung bei begrenzenden Sensoren. At-Automatisierungstechnik, 63(12), 968-976. https://doi.org/10.1515/auto-2015-0056
- Michalka, A., & Roppenecker, G. (2015). Kompensation von Drehmomentfehlern automatisierter Reibkupplungen durch beobachterbasierte Störgrößenaufschaltung. In VDI-Berichte Nr. 2233 (pp. 37-52). Baden-Baden: Düsseldorf: VDI-Verlag GmbH.
- Moor, T. (2015). Fault-tolerant supervisory control. In 5th IFAC International Workshop on Dependable Control of Discrete Systems (pp. 124-131).
- Moor, T., Schmidt, K.W., & Schmidt, K. (2015). Fault-tolerant control of discrete-event systems with lower-bound specifications. In Proceedings of the 5th IFAC International Workshop on Dependable Control of Discrete Systems, DCDS 2015 (pp. 161-166).
- Moseberg, J.-E., & Roppenecker, G. (2015). Robust cascade control for the horizontal motion of a vehicle with single-wheel actuators. Vehicle System Dynamics, 53(12), 1742-1758. https://doi.org/10.1080/00423114.2015.1081954
- Popp, J., & Deutscher, J. (2015). Zwei-Freiheitsgrade-Regelung eines Einzylinder-Dieselgenerators unter Berücksichtigung der Periodizität. In B. Lohmann und G. Roppenecker (Eds.), Methoden und Anwendungen der Regelungstechnik. (pp. 40-56). Aachen: Shaker Verlag.
- Röber, J., Zwick, C., Bänisch, A., Dirauf, S., Roppenecker, G., Weigel, R., & Dirauf, S. (2015). Novel Control Methods for Phase Lock Loops. In European conference on circuit theory and design (ECCTD). Trondheim: IEEE.
- Völz, A., & Graichen, K. (2015). Stochastische modellprädiktive Regelung unsicherer nichtlinearer Systeme basierend auf der Unscented-Transformation. In Proceedings GMA Fachausschuss 1.40 ``Theoretische Verfahren der Regelungstechnik'' (pp. 293-301). Salzburg (Austria).
- Völz, A., & Graichen, K. (2015). Stochastic model predictive control of nonlinear continuous-time systems using the unscented transformation. In 2015 European Control Conference (ECC) (pp. 3365-3370). Linz, AT: Institute of Electrical and Electronics Engineers Inc..
2014
- Baechle, T., Graichen, K., Buchholz, M., & Dietmayer, K. (2014). Slip-constrained model predictive control allocation for an all-wheel driven electric vehicle. In Proceedings 19th IFAC World Congress (pp. 12042-12047). Cape Town (South Africa).
- Baechle, T., Graichen, K., Buchholz, M., & Dietmayer, K. (2014). Vehicle dynamic control in challenging driving situations using nonlinear model predictive control allocation. In Proceedings 2014 IEEE Multi-Conference on Systems and Control (pp. 346-351). Nice (France).
- Deutscher, J. (2014). Dual observer-based compensators for nonlinear systems. International Journal of Robust and Nonlinear Control, 24(1), 110-122. https://doi.org/10.1002/rnc.2877
- Deutscher, J., & Harkort, C. (2014). Structure-preserving approximation of distributed-parameter second-order systems using Krylov subspaces. Mathematical and Computer Modelling of Dynamical Systems, 20(4), 395-413. https://doi.org/10.1080/13873954.2013.833524
- Deutscher, J., & Roppenecker, G. (2014). Robuste asymptotische Störkompensation mittels beobachterbasierter Störgrößenaufschaltungen. At-Automatisierungstechnik, 62(8), 547-561. https://doi.org/10.1515/auto-2014-1104
- Hentzelt, S., & Graichen, K. (2014). Experimental results for distributed model predictive control applied to a water distribution system. In Proceedings 2014 IEEE Multi-Conference on Systems and Control (pp. 1100-1106). Nice (France).
- Kaepernick, B., & Graichen, K. (2014). PLC implementation of a nonlinear model predictive controller. In Proceedings 19th IFAC World Congress (pp. 1892-1897). Cape Town (South Africa).
- Käpernick, B., & Graichen, K. (2014). Nichtlineare modellprädiktive Regelung auf SPS. Automatisierungstechnische Praxis, 56, 38-46. https://doi.org/10.17560/atp.v56i03.460
- Käpernick, B., & Graichen, K. (2014). The gradient based nonlinear model predictive control software GRAMPC. In Proceedings 13th European Control Conference (ECC) (pp. 1170-1175). Strasbourg (France).
- Käpernick, B., Süß, S., Schubert, E., & Graichen, K. (2014). A synthesis strategy for nonlinear model predictive controller on FPGA. In Proceedings 2014 UKACC 10th International Conference on Control (pp. 662-667). Loughborough (UK).
- Michalka, A. (2014). Ein modellbasiertes Gesamtkonzept zur Längsdynamiksteuerung und -regelung von Parallelhybridfahrzeugen (Dissertation).
- Moseberg, J.-E., & Roppenecker, G. (2014). Feed-forward control of a vehicle with single-wheel actuators. In Proceedings of the 19th IFAC World Congress on International Federation of Automatic Control, IFAC 2014 (pp. 6283-6288). IFAC Secretariat.
- Moseberg, J.-E., & Roppenecker, G. (2014). Horizontal vehicle motion control with single-wheel chassis actuators. At-Automatisierungstechnik, 62(3), 216-225. https://doi.org/10.1515/auto-2013-1066
- Nohr, M., Utz, T., & Graichen, K. (2014). Kinetic modelling of an industrial semi-batch alkoxylation reactor for control studies. In Proceedings 2014 UKACC 10th International Conference on Control (pp. 623-628). Loughborough (UK).
- Rhein, S., Utz, T., & Graichen, K. (2014). Efficient state constraint handling for MPC of the heat equation. In Proceedings 2014 UKACC 10th International Conference on Control (pp. 663-668). Loughborough (UK).
- Utz, T., Braun, M., Freckmann, G., & Graichen, K. (2014). Model of the glucose-insulin system of type-1 diabetics and optimization-based bolus calculation. In Proceedings 2014 UKACC 10th International Conference on Control (pp. 587-592). Loughborough (UK).
- Utz, T., & Graichen, K. (2014). Thermal modelling and optimization-based control of a batch diffusion furnace. In Proceedings 2014 IEEE Multi-Conference on Systems and Control (pp. 474-479). Nice (France).
- Utz, T., Rhein, S., & Graichen, K. (2014). Transformation approach to constraint handling in optimal control of the heat equation. In Proceedings 19th IFAC World Congress (pp. 9135-9140). Cape Town (South Africa).
2013
- Agethen, C., Moor, T., Baier, C., & Wittmann, T.K. (2013). Consistent abstractions for the purpose of supervisory control. In Proceedings of the 52nd IEEE Conference on Decision and Control, CDC 2013 (pp. 7291-7296). Florence, IT: Institute of Electrical and Electronics Engineers Inc..
- Claasen, G., Martin, P., & Graichen, K. (2013). Error growth due to noise during occlusions in inertially-aided tracking systems. In Proceedings 2013 IEEE Intern. Conf. Robotics and Automation (ICRA) (pp. 5781-5787). Karlsruhe (Germany).
- Deutscher, J. (2013). Finite-dimensional dual state feedback control of linear boundary control systems. International Journal of Control, 86(1), 41-53. https://doi.org/10.1080/00207179.2012.717723
- Deutscher, J. (2013). Krylov subspace methods for block patterned linear systems. In Proceedings of the 12th European Control Conference 2013 (pp. 827-832). Zurich.
- Deutscher, J., & Harkort, C. (2013). Approximation verteilt-parametrischer Systeme zweiter Ordnung mittels Krylov-Unterraummethoden. At-Automatisierungstechnik, 61, 533-544. https://doi.org/10.1524/auto.2013.0051
- Harkort, C., & Deutscher, J. (2013). An approach for the construction of the control input operator associated to boundary control systems. In Proceedings of the Workshop on Multidimensional Systems 2013 (pp. 51-56). Erlangen, DE.
- Hentzelt, S., & Graichen, K. (2013). An augmented Lagrangian method in distributed dynamic optimization based on approximate neighbor dynamics. In Proceedings IEEE Intern. Conf. Systems, Man, and Cybernetics (SMC 2013) (pp. 571-576). Manchester (UK).
- Hippe, P. (2013). Windup prevention in systems with input and output constraints. In Proceedings of the 2013 International Conference on Process Control, PC 2013 (pp. 1-6). Strbske Pleso.
- Käpernick, B., & Graichen, K. (2013). Model predictive control of an overhead crane using constraint substitution. In Proceedings 2013 American Control Conference (ACC) (pp. 3979-3984). Washington, DC (USA).
- Käpernick, B., & Graichen, K. (2013). Transformation of output constraints in optimal control applied to a double pendulum on a cart. In Proceedings 9th IFAC Symposium ``Nonlinear Control Systems'' (NOLCOS) (pp. 193-198). Toulouse (Italy).
- Käpernick, B., Hentzelt, S., & Graichen, K. (2013). A parallelizable decomposition approach for constrained optimal control problems. In Proceedings 52th IEEE Conference on Decision and Control (CDC) (pp. 5783-5788). Florence (Italy).
- Michalka, A., & Roppenecker, G. (2013). Kupplungsschlupfregelung als Teil eines Gesamtkonzepts zur Antriebsstrangsteuerung eines Parallelhybridfahrzeugs. In VDI-Berichte Nr. 2196 (pp. 121-132). Düsseldorf: VDI Verlag GmbH.
- Mohr, A., & Deutscher, J. (2013). Analyse von PDE-DAE-Systemen mittels einer Normalform. In G. Roppenecker und B. Lohmann (Eds.), Methoden und Anwendung der Regelungstechnik. (pp. 77-97). Aachen: Shaker Verlag.
- Mohr, A., & Deutscher, J. (2013). Parametric state feedback design for linear infinite-dimensional systems. In Proceedings of the 12th European Control Conference 2013 (pp. 2086-2091). Zurich.
- Rhein, S., Utz, T., & Graichen, K. (2013). Model predictive control and moving horizon estimation of a large-scale chemical reactor model. In Proceedings 1st {IFAC} Symposium on Control of Systems Governed by Partial Differential Equations (CPDE) (pp. 121-126). Paris (France).
- Utz, T., & Graichen, K. (2013). Two-degrees-of-freedom optimization-based control and estimation of a parabolic equation system. In Proceedings 2013 American Control Conference (ACC) (pp. 384-389). Washington, DC (USA).
- Utz, T., Graichen, K., & Kugi, A. (2013). Combined feedforward/model predictive tracking control design for nonlinear diffusion-convection-reaction-systems. In F. Tröltzsch DH (Eds.), System Modeling and Optimization. (pp. 296-305). Vienna (Austria): Springer.
2012
- Agethen, C., Baier, C., & Moor, T. (2012). A hierarchical control architecture for sequential behaviours. In Proceedings of the 11th International Workshop on Discrete Event Systems, WODES 2012 (pp. 259-264). Guadalajara, Jalisco.
- Boutalis, Y., Moor, T., & Schmidt, K. (2012). Fuzzy Hybrid Systems modeling with application in decision making and control. In Proceedings of the 2012 6th IEEE International Conference Intelligent Systems, IS 2012 (pp. 290-296). Sofia, BG.
- Egretzberger, M., Graichen, K., & Kugi, A. (2012). Flatness-based MPC and global path planning towards cognition-supported pick-and-place tasks of tower cranes. In Irschik H, Krommer M, Belyaev A (Eds.), Advanced Dynamics and Model-Based Control of Structures and Machines. (pp. 63-71). Vienna (Austria): Springer.
- Graichen, K. (2012). A fixed-point iteration scheme for real-time model predictive control. Automatica, 48(7), 1300-1305. https://doi.org/10.1016/j.automatica.2012.03.023
- Graichen, K., & Käpernick, B. (2012). A real-time gradient method for nonlinear model predictive control. In Zheng T (Eds.), Frontiers of Model Predictive Control. (pp. 9-28). InTech (open access).
- Graichen, K., & Käpernick, B. (2012). Nonlinear MPC with systematic handling of a class of constraints. In Oberwolfach Report No. 12/2012 (Workshop ``Control Theory: Mathematical Perspectives on Complex Networked Systems'') (pp. 17-18). Oberwolfach (Germany).
- Harkort, C., & Deutscher, J. (2012). Parametric approximation of connected Euler-Bernoulli beams with variable beam lengths. In Proceedings of the MATHMOD 2012 (pp. 734-739). Wien, AT.
- Harkort, C., & Deutscher, J. (2012). Stability and passivity preserving Petrov-Galerkin approximation of linear infinite-dimensional systems. Automatica, 48(7), 1347-1352. https://doi.org/10.1016/j.automatica.2012.04.010
- Harkort, C., & Deutscher, J. (2012). Strukturerhaltende Approximation linearer verteilt-parametrischer PCHD-Systeme. At-Automatisierungstechnik, 60(9), 534-546. https://doi.org/10.1524/auto.2012.1023
- Hentzelt, S., & Graichen, K. (2012). Dual decomposition of optimal control problems with coupled nonlinear dynamics. In CD-ROM Proceedings European Congress on Computational Methods in Applied Sciences and Engineering (ECCOMAS 2012). Vienna (Austria).
- Schmidt, K., & Boutalis, Y.S. (2012). Fuzzy discrete event systems for multiobjective control: Framework and application to mobile robot navigation. IEEE Transactions on Fuzzy Systems, 20(5), 910-922. https://doi.org/10.1109/TFUZZ.2012.2189219
- Ulbrich, P., Franzmann, F.P., Harkort, C., Hoffmann, M., Klaus, T., Rebhan, A., & Schröder-Preikschat, W. (2012). Taking Control: Modular and Adaptive Robotics Process Control Systems. In Proceedings of the 10th IEEE International Symposium on Robotic and Sensors Environments (pp. 55-60). Magdeburg: Los Alamitos: IEEE Computer Society.
2011
- Bäuml, M., & Deutscher, J. (2011). Entwurf von Ausgangsrückführungen für nichtlineare Systeme mittels Sum-of-Squares-Programmierung. At-Automatisierungstechnik, 59, 364-373. https://doi.org/10.1524/auto.2011.0927
- Deutscher, J. (2011). Entwurf dualer Störbeobachter für lineare konzentriert- und verteilt-parametrische Systeme. At-Automatisierungstechnik, 59, 552-562. https://doi.org/10.1524/auto.2011.0947
- Graichen, K., & Utz, T. (2011). Combined feedforward/model predictive tracking control design for nonlinear diffusion-convection-reaction-systems. In Proceedings 25th IFIP TC7 Conference on System Modeling and Optimization. Berlin (Germany).
- Harkort, C., & Deutscher, J. (2011). Abtastregelung linearer verteilt-parametrischer Systeme unter Verwendung allgemeiner Halteglieder. In B. Lohmann und G. Roppenecker (Eds.), Methoden und Anwendungen der Regelungstechnik. (pp. 89-99). Aachen: Shaker Verlag.
- Harkort, C., & Deutscher, J. (2011). Discrete-time modal state reconstruction for infinite-dimensional systems using generalized sampling. IFAC-PapersOnLine, 44, 13311-13316. https://doi.org/10.3182/20110828-6-IT-1002.00795
- Harkort, C., & Deutscher, J. (2011). Finite-dimensional observer-based control of linear distributed parameter systems using cascaded output observers. International Journal of Control, 84(1), 107-122. https://doi.org/10.1080/00207179.2010.541942
- Harkort, C., & Deutscher, J. (2011). Krylov subspace methods for linear infinite-dimensional systems. IEEE Transactions on Automatic Control, 56, 441-447. https://doi.org/10.1109/TAC.2010.2090063
- Moor, T., Schmidt, K., & Wittmann, T.K. (2011). Abstraction-based control for not necessarily closed behaviours. In Proceedings of the 18th IFAC World Congress (pp. 6988-6993). Milano, IT.
- Schmid, C., & Roppenecker, G. (2011). Parameteridentification for LTI-systems using modulating functions generated by a signal model. At-Automatisierungstechnik, 59(8), 521-528. https://doi.org/10.1524/auto.2011.0942
- Steinböck, A., Graichen, K., Kugi, A., & Wild, D. (2011). A mathematical model of a slab reheating furnace for simulation, control, and optimization. In Proceedings 4th International Conference on Modelling and Simulation of Metallurgical Processes in Steelmaking (STEELSIM). Düsseldorf (Germany).
- Ulbrich, P., Kapitza, R., Harkort, C., Schmid, R., & Schröder-Preikschat, W. (2011). I4Copter: An Adaptable and Modular Quadrotor Platform. In Proceedings of the 26th ACM Symposium on Applied Computing (pp. 380-396). TaiChung, Taiwan, TW: New York, NY, USA: ACM.
2010
- Antritter, F., & Deutscher, J. (2010). Folgeregelung nichtlinearer Eingrößensysteme mittels linearer zeitvarianter Ausgangsrückführung. At-Automatisierungstechnik, 58, 383-393. https://doi.org/10.1524/auto.2010.0853
- Boutalis, Y., & Schmidt, K. (2010). Multi-objective decision making using fuzzy discrete event systems: A mobile robot example. In Proceedings of the 18th Mediterranean Conference on Control and Automation, MED'10 (pp. 575-580). Marrakech.
- Deutscher, J., & Harkort, C. (2010). A parametric approach to finite-dimensional control of linear distributed-parameter systems. International Journal of Control, 58, 383-393. https://doi.org/10.1080/00207179.2010.487545
- Deutscher, J., & Harkort, C. (2010). Entwurf endlich-dimensionaler Regler für lineare verteilt-parametrische Systeme durch Ausgangsbeobachtung. At-Automatisierungstechnik, 58, 435-446. https://doi.org/10.1524/auto.2010.0859
- Deutscher, J., & Harkort, C. (2010). Führungs- und Störgrößenaufschaltungen für lineare verteilt-parametrische Systeme. At-Automatisierungstechnik, 58(1), 27-37. https://doi.org/10.1524/auto.2010.0812
- Deutscher, J., & Harkort, C. (2010). Parametric approach to the decoupling of linear distributed-parameter systems. IET Control Theory and Applications, 4(12), 2855-2866. https://doi.org/10.1049/iet-cta.2009.0286
- Graichen, K., Egretzberger, M., & Kugi, A. (2010). Suboptimal model predictive control of a laboratory crane. In Proceedings 8th IFAC Symposium ``Nonlinear Control Systems'' (NOLCOS) (pp. 397-402). Bologna (Italy).
- Graichen, K., Petit, N., Kugi, A., & Chaplais, F. (2010). Handling constraints in optimal control with saturation functions and system extension. Systems & Control Letters, 59(11), 671-679. https://doi.org/10.1016/j.sysconle.2010.08.003
- Moor, T., Schmidt, K., & Perk, S. (2010). Applied supervisory control for a flexible manufacturing system. In Proceedings of the 10th International Workshop on Discrete Event Systems, WODES 2010 (pp. 253-258). Berlin.
- Raisch, J., Moor, T., Bajcinca, N., Geist, S., & Nenchev, V. (2010). Distributed state estimation for hybrid and discrete event systems using l-complete approximations. In Proceedings of the 10th International Workshop on Discrete Event Systems, WODES 2010 (pp. 129-134). Berlin.
- Schmidt, K. (2010). Abstraction-based failure diagnosis for discrete event systems. Systems & Control Letters, 59(1), 42-47. https://doi.org/10.1016/j.sysconle.2009.11.004
- Utz, T., Graichen, K., & Kugi, A. (2010). Trajectory planning and receding horizon tracking control of a quasilinear diffusion-convection-reaction system. In Proceedings 8th IFAC Symposium ``Nonlinear Control Systems'' (NOLCOS) (pp. 587-592). Bologna (Italy).
2009
- Bäuml, M., & Deutscher, J. (2009). Stabilisierung nichtlinearer Systeme mit Zustandsbeschränkungen mittels SOS-Programmierung. In G. Roppenecker und B. Lohmann (Eds.), Methoden und Anwendungen der Regelungstechnik. (pp. 47-60). Aachen: Shaker Verlag.
- Bäuml, M., & Deutscher, J. (2009). Stabilization of nonlinear systems with input saturation using SOS-programming. In Proceedings of the MATHMOD 2009. Wien, AT.
- Bäuml, M., & Deutscher, J. (2009). Stabilization of nonlinear systems with non-polynomial nonlinearities using SOS-programming. In Proceedings of the 11th IASTED International Conference on Control and Applications, CA 2009 (pp. 82-89). Cambridge.
- Deutscher, J., & Harkort, C. (2009). Parametric state feedback design for second-order Riesz-spectral systems. In Proceedings of the 10th European Control Conference 2009. Budapest, HU.
- Deutscher, J., & Harkort, C. (2009). Parametric state feedback design of linear distributed-parameter systems. International Journal of Control, 82(6), 1060-1069. https://doi.org/10.1080/00207170802434383
- Graichen, K., Kiefer, T., & Kugi, A. (2009). Real-time trajectory optimization under input constraints for a flatness-controlled laboratory helicopter. In Proceedings 10th European Control Conference (ECC). Budapest (Hungary).
- Graichen, K., & Petit, N. (2009). Incorporating a class of constraints into the dynamics of optimal control problems. Optimal Control Applications & Methods, 30(6), 537-561. https://doi.org/10.1002/oca.880
- Harkort, C., & Deutscher, J. (2009). Reduktion von Spillover für lineare verteilt-parametrische Systeme. In G. Roppenecker und B. Lohmann (Eds.), Methoden und Anwendungen der Regelungstechnik. (pp. 15-26). Aachen: Shaker Verlag.
- Harkort, C., & Deutscher, J. (2009). Spillover reduction for linear distributed-parameter systems using dynamic extensions. In Proceedings of the 10th European Control Conference 2009. Budapest, HU.
- Hippe, P., & Deutscher, J. (2009). A polynomial approach to the prevention of windup in stable MIMO systems. In Proceedings of the 10th European Control Conference 2009. Budapest, HU.
- Hippe, P., & Deutscher, J. (2009). Design of observer-based compensators: From the time to the frequency domain. Springer London.
- Hippe, P., & Deutscher, J. (2009). Windup prevention for MIMO systems in the frequency domain. Archives of Control Sciences, 19, 355-369.
- Kotman, P., Bitzer, M., Graichen, K., & Kugi, A. (2009). Hybrid modeling of a two-stage turbocharged diesel engine air system. In Proceedings 6th Vienna International Conference on Mathematical Modelling (MATHMOD~09) (pp. 2015-2024). Vienna (Austria).
- Michalka, A. (2009). Antriebskoordinator am Beispiel eines Parallelhybridfahrzeugs. In Methoden und Anwendungen der Regelungstechnik, Erlangen-Münchener Workshops 2007 und 2008 (pp. 109 - 119). Hirschberg: Shaker Verlag.
- Michalka, A., Roppenecker, G., Wurmthaler, C., & Orend, R. (2009). Modellbasierte Steuerungsberechnung für Doppelkupplungsgetriebe als Teil eines neuen Gesamtkonzepts zur Getriebesteuerung und - regelung. At-Automatisierungstechnik, 57(5), 230-237. https://doi.org/10.1524/auto.2009.0767
- Ponssard, C., Graichen, K., Petit, N., & Laurent-Varin, J. (2009). Ascent optimization for a heavy space launcher. In Proceedings 10th European Control Conference (ECC). Budapest (Hungary).
- Roppenecker, G. (2009). State feedback control of linear systems - A renewed approach. At-Automatisierungstechnik, 57(10), 491-498. https://doi.org/10.1524/auto.2009.0796
- Schmidt, E.G., & Schmidt, K. (2009). Message scheduling for the FlexRay protocol: The dynamic segment. IEEE Transactions on Vehicular Technology, 58(5), 2160-2169. https://doi.org/10.1109/TVT.2008.2008653
- Wurmthaler, C., & Kühnlein, A. (2009). Model based feed forward control for measurable disturbances. At-Automatisierungstechnik, 57(7), 328-331. https://doi.org/10.1524/auto.2009.0782
2008
- Bäuml, M., & Deutscher, J. (2008). Approximate observer error linearization for nonlinear systems with input. IFAC-PapersOnLine, 41, 7600-7605. https://doi.org/10.3182/20080706-5-KR-1001.01285
- Deutscher, J., & Bäuml, M. (2008). Approximate feedback linearization using multivariable Legendre polynomials. IFAC-PapersOnLine, 41, 4749-4754. https://doi.org/10.3182/20080706-5-KR-1001.00799
- Deutscher, J., & Harkort, C. (2008). Vollständige Modale Synthese eines Wärmeleiters. At-Automatisierungstechnik, 56, 539-548. https://doi.org/10.1524/auto.2008.0732
- Graichen, K., & Petit, N. (2008). A continuation approach to state and adjoint calculation in optimal control applied to the reentry problem. In Proceedings 17th IFAC World Congress (pp. 14307-14312). Seoul, Korea.
- Graichen, K., & Petit, N. (2008). Solving the Goddard problem with thrust and dynamic pressure constraints using saturation functions. In Proceedings of the 17th World Congress, International Federation of Automatic Control, IFAC. Seoul.
- Graichen, K., & Petit, N. (2008). Constructive methods for initialization and handling mixed state-input constraints in optimal control. Journal of Guidance Control and Dynamics, 31(5), 1334-1343. https://doi.org/10.2514/1.33870
- Graichen, K., & Zeitz, M. (2008). Feedforward control design for nonlinear MIMO systems under input constraints. International Journal of Control, 81(3), 417-427. https://doi.org/10.1080/00207170701591465
- Graichen, K., & Zeitz, M. (2008). Feedforward control design for finite-time transition problems of nonlinear systems with input and output constraints. IEEE Transactions on Automatic Control, 53(5), 1273-1278. https://doi.org/10.1109/TAC.2008.921044
- Michalka, A., & Orend, R. (2008). Gesamtkonzept zur Steuerung und Regelung von Fahrzeugen mit Doppelkupplungsgetriebe. In VDI-Berichte Nr. 2029 (pp. 247-261). Düsseldorf: VDI-Verlag GmbH.
- Michalka, A., Roppenecker, G., Wurmthaler, C., & Orend, R. (2008). Modellbasierte Steuerungsberechnung für Doppelkupplungsgetriebe als Teil eines neuen Gesamtkonzepts zur Getriebesteuerung und -regelung. In VDI-Berichte Nr. 2009 (pp. 657-666). Düsseldorf: VDI Verlag GmbH.
- Moor, T., Schmidt, K., & Perk, S. (2008). LibFAUDES - an open source C++ library for discrete event systems. In Proceedings of the 9th International Workshop on Discrete Event Systems, WODES' 08 (pp. 125-130). Goteborg.
- Perk, S., Moor, T., & Schmidt, K. (2008). Controller synthesis for an I/O-based hierarchical system architecture. In Proceedings of the 9th International Workshop on Discrete Event Systems, WODES' 08 (pp. 474-479). Goteborg.
- Schmidt, E.G., & Schmidt, K. (2008). Message scheduling for the static segment of the FlexRay protocol. In Proceedings of the 2008 IEEE 16th Signal Processing, Communication and Applications Conference, SIU. Aydin.
- Schmidt, E.G., & Schmidt, K. (2008). Shared medium communication for distributed discrete event control. In Proceedings of the 2008 IEEE 16th Signal Processing, Communication and Applications Conference, SIU. Aydin.
- Schmidt, K., Moor, T., & Perk, S. (2008). Nonblocking hierarchical control of decentralized discrete event systems. IEEETransactions on Automatic Control, 53(10), 2252-2265. https://doi.org/10.1109/TAC.2008.2006817
2007
- Deutscher, J. (2007). A numerical approach to approximate input-output linearization of nonlinear systems. In Proceedings of the 9th European Control Conference 2007 (pp. 3635-3640). Institute of Electrical and Electronics Engineers Inc..
- Genzel, M., Orend, R., Michalka, A., & Pohlmann, R. (2007). Control unit for a dry double clutch transmission. In 6th Int. Symposium "Innovative Automotive Transmissions". Berlin.
- Graichen, K., Treuer, M., & Zeitz, M. (2007). Swing-up of the double pendulum on a cart by feedforward and feedback control with experimental validation. Automatica, 43(1), 63-71. https://doi.org/10.1016/j.automatica.2006.07.023
- Hippe, P. (2007). Stable and unstable systems with amplitude and rate saturation.
- Müller, B., & Deutscher, J. (2007). Continuous curvature trajectory design and feedforward control for parking a car. IEEE Transactions on Control Systems Technology, 15, 541-553. https://doi.org/10.1109/TCST.2006.890289
- Müller, B., & Deutscher, J. (2007). Orbital tracking control for car parking via control of the clock using a nonlinear reduced order steering-angle observer. In Proceedings of the 9th European Control Conference 2007 (pp. 1917-1924). Institute of Electrical and Electronics Engineers Inc..
- Müller, B., & Deutscher, J. (2007). Orbital tracking control for parking via control of the clock. In B. Lohmann und G. Roppenecker (Eds.), Methoden und Anwednungen der Regelungstechnik..
- Müller, B., Deutscher, J., Grodde, S., Giesen, F., & Roppenecker, G. (2007). Universelle Bahnplanung für das automatische Einparken. ATZ - Automobiltechnische Zeitschrift, 109, 66-71. https://doi.org/10.1007/BF03221861
- Schmidt, K. (2007). A shared-medium communication architecture for distributed discrete event systems. In Proceedings of the 2007 Mediterranean Conference on Control and Automation, MED. Athens.
- Schmidt, K. (2007). Hierarchical and decentralized multitasking control of discrete event systems. In Proceedings of the 46th IEEE Conference on Decision and Control 2007, CDC (pp. 5936-5941). New Orleans, LA.
- Schmidt, K. (2007). Systematic message schedule construction for time-triggered CAN. IEEE Transactions on Vehicular Technology, 56, 3431-3441. https://doi.org/10.1109/TVT.2007.906413
2006
- Antritter, F., & Deutscher, J. (2006). Nonlinear tracking control of a dc motor via a boost-converter using linear dynamic output feedback. In Proceedings of the 45th IEEE Conference on Decision and Control 2006, CDC (pp. 6587-6592). San Diego, CA.
- Antritter, F., & Deutscher, J. (2006). Trajectory design using differential parameterizations. Proceedings in Applied Mathematics and Mechanics, 6, 795-796. https://doi.org/10.1002/pamm.200610377
- Antritter, F., Reger, J., & Maurer, P. (2006). Flatness based control of a buck-converter driven DC motor. In Proceedings of the 4th IFAC Symposium on Mechatronic Systems, MX 2006 (pp. 36-41). Heidelberg.
- Deutscher, J. (2006). A parametric frequency domain approach to decoupling with coupled rows. International Journal of Systems Science, 37(11), 735-746. https://doi.org/10.1080/00207720600813087
- Deutscher, J. (2006). Numerical design of nonlinear observers with approximately linear error dynamics. In Proceedings of the Joint 2006 IEEE Conference on Control Applications (CCA), Computer-Aided Control Systems Design Symposium (CACSD) and International Symposium on Intelligent Control (ISIC) (pp. 2985-2990). Munich.
- Deutscher, J., & Bäuml, M. (2006). A state space embedding approach to time discretization via an approximate normal form. In Proceedings of the MATHMOD 2006. Wien, AT.
- Deutscher, J., & Bäuml, M. (2006). Design of nonlinear observers with approximately linear error dynamics using multivariable Legendre polynomials. International Journal of Robust and Nonlinear Control, 16, 709-727. https://doi.org/10.1002/rnc.1091
- Deutscher, J., & Schmid, C. (2006). A numerical approach to approximate feedback linearization. In Proceedings of the Joint 2006 IEEE Conference on Control Applications (CCA), Computer-Aided Control Systems Design Symposium (CACSD) and International Symposium on Intelligent Control (ISIC) (pp. 1934-1939). Munich.
- Deutscher, J., & Schmidt, C. (2006). A state space embedding approach to approximate feedback linearization of single input nonlinear control systems. International Journal of Robust and Nonlinear Control, 16(9), 421-440. https://doi.org/10.1002/rnc.1069
- Graichen, K. (2006). Feedforward Control Design for Finite-Time Transition Problems of Nonlinear Systems with Input and Output Constraints. Aachen (Germany): Shaker Verlag.
- Graichen, K., Hagenmeyer, V., & Zeitz, M. (2006). Feedforward control with online parameter estimation applied to the Chylla-Haase reactor benchmark. Journal of Process Control, 16(7), 733-745. https://doi.org/10.1016/j.jprocont.2006.01.001
- Graichen, K., & Zeitz, M. (2006). A new approach to feedforward control design under output constraints applied to the side-stepping of the triple inverted pendulum. In Proceedings 4th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2006) (pp. 181-186). Heidelberg (Germany).
- Graichen, K., & Zeitz, M. (2006). Inversionsbasierter Vorsteuerungsentwurf mit Ein- und Ausgangsbeschränkungen. At-Automatisierungstechnik, 54(4), 187-199. https://doi.org/10.1524/auto.2006.54.4.187
- Graichen, K., & Zeitz, M. (2006). Vorsteuerungsentwurf mit Eingangsbeschränkungen für nichtlineare Mehrgrößensysteme. In Proceedings GMA Fachausschuss 1.40 ``Theoretische Verfahren der Regelungstechnik'' (pp. 245-260). Bosen (Germany).
- Hippe, P. (2006). Windup prevention for stable and unstable MIMO systems. International Journal of Systems Science, 37(2), 67-78. https://doi.org/10.1080/00207720500443969
- Kiefer, T., Kugi, A., Graichen, K., & Zeitz, M. (2006). Feedforward and feedback tracking control of a 3DOF helicopter experiment under input and output constraints. In Proceedings 45th IEEE Conference on Decision and Control (CDC) (pp. 1586-1593). San Diego (USA).
- Müller, B., & Deutscher, J. (2006). Zweistufige Trajektorienplanung für das automatische Einparken. In Proceedings of the AUTOREG 2006 (pp. 379-388). Wiesloch.
- Müller, B., Deutscher, J., & Grodde, S. (2006). Trajectory generation and feedforward control for parking a car. In Proceedings of the Joint 2006 IEEE Conference on Control Applications (CCA), Computer-Aided Control Systems Design Symposium (CACSD) and International Symposium on Intelligent Control (ISIC) (pp. 163-168). Munich.
- Schmidt, K. (2006). Hierarchical discrete event systems with inputs and outputs. In Proceedings of the 8th International Workshop on Discrete Event Systems, WODES 2006 (pp. 427-432). Ann Arbor, MI.
- Schmidt, K. (2006). Marked-string accepting observers for the hierarchical and decentralized control of discrete event systems. In Proceedings of the 8th International Workshop on Discrete Event Systems, WODES 2006 (pp. 413-418). Ann Arbor, MI.
- Schmidt, K. (2006). Modular and decentralized supervisory control of concurrent discrete event systems using reduced system models. In Proceedings of the 8th International Workshop on Discrete Event Systems, WODES 2006 (pp. 149-154). Ann Arbor, MI.
- Wieland, P., Meurer, T., Graichen, K., & Zeitz, M. (2006). Feedforward control design under input constraints for a tubular reactor model. In Proceedings 45th IEEE Conference on Decision and Control (CDC) (pp. 3968-3973). San Diego (USA).
2005
- Antritter, F., & Deutscher, J. (2005). Asymptotic tracking for nonlinear systems using fictitious inputs. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, CDC-ECC '05 (pp. 4022-4027). Seville.
- Deutscher, J. (2005). Input-output linearization of nonlinear systems using multivariable Legendre polynomials. Automatica, 41, 299-304. https://doi.org/10.1016/j.automatica.2004.11.001
- Deutscher, J., Schmidt, K., & Antritter, F. (2005). Feedforward control of nonlinear systems using fictitious inputs. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, CDC-ECC '05 (pp. 7264-7269). Seville, ES.
- Graichen, K., Hagenmeyer, V., & Zeitz, M. (2005). Adaptive feedforward control with parameter estimation for the Chylla-Haase polymerization reactor. In Proceedings 44th IEEE Conference on Decision and Control & European Control Conference (CDC--ECC) (pp. 3049-3054). Sevilla (Spain).
- Graichen, K., Hagenmeyer, V., & Zeitz, M. (2005). A new approach to inversion-based feedforward control design for nonlinear systems. Automatica, 41(12), 2033-2041. https://doi.org/10.1016/j.automatica.2005.06.008
- Graichen, K., Treuer, M., & Zeitz, M. (2005). Fast side-stepping of the triple inverted pendulum via constrained nonlinear feedforward control design. In Proceedings 44th IEEE Conference on Decision and Control & European Control Conference (CDC--ECC) (pp. 1096-1101). Sevilla (Spain).
- Graichen, K., & Zeitz, M. (2005). Feedforward control design for nonlinear systems under input constraints. In T. Meurer, K. Graichen, E.D. Gilles (Eds.), Control and Observer Design for Nonlinear Finite and Infinite Dimensional Systems. (pp. 235-252). Berlin (Germany): Springer.
- Graichen, K., & Zeitz, M. (2005). Nonlinear feedforward and feedback tracking control with input constraints solving the pendubot swing-up problem. In Proceedings 16th IFAC World Congress (pp. 1112-1117). Prague (CZ).
- Graichen, K., & Zeitz, M. (2005). Vorsteuerungsentwurf mit Ausgangsbeschränkungen am Beispiel von Mehrfachpendeln. In Proceedings GMA Fachausschuss 1.40 ``Theoretische Verfahren der Regelungstechnik'' (pp. 39-49). Bosen (Germany).
- Meurer, T., Graichen, K., & Gilles, E.D. (Eds.) (2005). Control and Observer Design for Nonlinear Finite and Infinite Dimensional Systems. Berlin (Germany): Springer.
- Meurer, T., Graichen, K., & Zeitz, M. (2005). Motion planning and feedforward control for distributed parameter systems under input constraints. In Proceedings 16th IFAC World Congress (pp. 934-939). Prague (CZ).
- Müller, B., & Deutscher, J. (2005). Approximate input-output linearization using L2-optimal bilinearization. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, CDC-ECC '05 (pp. 4903-4908). Seville.
- Schmidt, K. (2005). A hierarchical architecture for nonblocking control of decentralized discrete event systems. In Proceedings of the 20th IEEE International Symposium on Intelligent Control, ISIC '05 and the13th Mediterranean Conference on Control and Automation, MED '05 (pp. 902-907). Limassol.
- Schmidt, K. (2005). Natural gait generation techniques for multi-bodied isolated mechanical systems. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (pp. 3664-3669). Barcelona.
- Schmidt, K. (2005). Nonblocking hierarchical control of decentralized des. In Proceedings of the 16th Triennial World Congress of International Federation of Automatic Control, IFAC 2005 (pp. 163-168). Prague.
- Wurmthaler, C., & Meier, G. (2005). Longitudinal vehicle guidance using neural networks. In Proceedings of the 2005 IEEE International Symposium on Computational Intelligence in Robotics and Automation CIRA 2005 (pp. 685-688). Espoo.
- Zeitz, M., Graichen, K., & Meurer, T. (2005). Vorsteuerung mit Trajektorienplanung als Basis einer Folgeregelung. In GMA-Kongress ``Automation als interdisziplinäre Herausforderung'', VDI-Berichte Nr. 1883 (pp. 795-806). Baden-Baden (Germany).
2004
- Antritter, F., Müller, B., & Deutscher, J. (2004). Tracking control for nonlinear flat systems by linear dynamic output feedback. IFAC-PapersOnLine, 37, 141-146. https://doi.org/10.1016/S1474-6670(17)31213-2
- Graichen, K., Hagenmeyer, V., & Zeitz, M. (2004). Van de Vusse CSTR as a benchmark problem for nonlinear feedforward control design techniques. In Proceedings 6th IFAC Symposium ``Nonlinear Control Systems'' (NOLCOS) (pp. 1123-1128). Stuttgart (Germany).
- Graichen, K., & Zeitz, M. (2004). Swing-up of a pendubot under input constraints. In Proceedings 49th Ilmenau International Scientific Colloquium (pp. 393-398). Ilmenau (Germany).
- Meier, G., Roppenecker, G., & Wurmthaler, C. (2004). Automatische Fahrzeug-Längsführung mittels Trajektorien- Folgeregelung: Ein modulares Konzept zur Trennung zwischen Fahrzeug- und Fahrer-Spezifika.
- Reger, J., & Schmidt, K. (2004). A finite field framework for modeling, analysis and control of finite state automata. Mathematical and Computer Modelling of Dynamical Systems, 10, 253-285. https://doi.org/10.1080/13873950412331300142
- Reger, J., & Schmidt, K. (2004). Modeling and analyzing finite state automata in the finite field F 2. Mathematics and Computers in Simulation, 66, 193-206. https://doi.org/10.1016/j.matcom.2003.11.005
- Roppenecker, G., Wurmthaler, C., & Meier, G. (2004). Automatic lateral vehicle guidance using tracking control - A modular approach to separate driver- and vehicle-dependent dynamics. In Proceedings of the 2004 IEEE Intelligent Vehicles Symposium (pp. 145-149). Parma.
2003
- Bitzer, M., Graichen, K., & Zeitz, M. (2003). Model-based trajectory control of pressure swing adsorption plants. In Proceedings 7th International Symposium on Advanced Control of Chemical Processes (ADCHEM 2003) (pp. 627-632). Hong Kong (China).
- Deutscher, J. (2003). A linear differential operator approach to flatness based tracking for linear and non-linear systems. International Journal of Control, 76, 266-276. https://doi.org/10.1080/0020717031000067358
- Deutscher, J. (2003). Asymptotically exact input-output linearization using Carleman linearization. In Proceedings of the 7th European Control Conference 2003 (pp. 1726-1731). Institute of Electrical and Electronics Engineers Inc..
- Deutscher, J., & Lohmann, B. (2003). Flatness based asymptotic disturbance rejection for linear and nonlinear systems. In Proceedings of the 7th European Control Conference 2003 (pp. 3183-3188). Institute of Electrical and Electronics Engineers Inc..
- Hippe, P. (2003). Hyperbolic QR factorization for J-spectral factorization of polynomial matrices. In Proceedings of the 42nd IEEE Conference on Decision and Control (pp. 3479-3484). Maui, HI.
- Hippe, P. (2003). Windup prevention for unstable systems. Automatica, 39(11), 1967-1973. https://doi.org/10.1016/S0005-1098(03)00216-4
- Hippe, P., & Deutscher, J. (2003). Frequency domain design of reduced order H∞ filters for discrete time systems. In Proceedings of the 7th European Control Conference 2003 (pp. 2207-2212). Institute of Electrical and Electronics Engineers Inc..
- Reger, J., & Schmidt, K. (2003). Aspects on analysis and synthesis of linear discrete systems over the finite field Fq. In Proceedings of the 2003 European Control Conference, ECC 2003 (pp. 1601-1606). Institute of Electrical and Electronics Engineers Inc..
- Schmitt-Braeß, G. (2003). Design of robust multivariable feedback control systems using pole assignment and positivity concepts. European Journal of Control, 9(4), 384-391. https://dx.doi.org/10.3166/ejc.9.384-391
- Schmitt-Braeß, G. (2003). Feedback of passive systems: Synthesis and analysis of linear robust control systems. IEE Proceedings Control Theory and Applications, 150(1), 83-91. https://dx.doi.org/10.1049/ip-cta:20030104
- Schmitt-Braeß, G. (2003). Using circle criteria for verifying asymptotic stability in PI-like fuzzy control systems: Application to the milling process. IEE Proceedings Control Theory and Applications, 150(6), 619-627. https://dx.doi.org/10.1049/ip-cta:20030795
2002
- Deutscher, J. (2002). Approximate input-output linearization of nonminimum phase nonlinear systems with linear unforced dynamics. IFAC-PapersOnLine, 35, 91-96. https://doi.org/10.3182/20020721-6-ES-1901.00265
- Deutscher, J. (2002). Frequency domain design of reduced order observer based H∞ controllers - a polynomial approach. International Journal of Control, 75, 1196-1212. https://doi.org/10.1080/00207170210162047
- Deutscher, J. (2002). On parametric state feedback design in the frequency domain. IFAC-PapersOnLine, 35, 285-290. https://doi.org/10.3182/20020721-6-ES-1901.00209
- Hippe, P., & Deutscher, J. (2002). Design of reduced order H∞ filters for discrete time systems. IFAC-PapersOnLine, 35, 107-112. https://doi.org/10.3182/20020721-6-ES-1901.00179
- Reger, J. (2002). Cycle analysis for deterministic finite state automata. In Proceedings of the 15th World Congress of the International Federation of Automatic Control, 2002 (pp. 247-252). IFAC Secretariat.
- Schmitt-Braeß, G. (2002). A generalized circle criterion and its fields of application. In Proceedings of the 2002 IEEE International Conference on Control Applications (pp. 1100-1105). Glasgow.
- Schmitt-Braeß, G. (2002). Extended Circle Criterion: Stable fuzzy control of a milling process. In Proceedings of the 15th World Congress of the International Federation of Automatic Control, 2002 (pp. 85-90). IFAC Secretariat.
- Schmitt-Braeß, G. (2002). Multivariable circle criterion: Stable fuzzy control of a milling process. In Proceedings of the 2002 IEEE International Conference on Control Applications (pp. 385-390). Glasgow.
2001
- Deutscher, J., & Hippe, P. (2001). Design of reduced order H∞ filters in the frequency domain. In Proceedings of the Workshop on Polynomial Design Methods in Signals, Systems and Control 2001. Prag, CZ.
- Deutscher, J., & Hippe, P. (2001). Parametric compensator design in the frequency domain. International Journal of Control, 74, 1467-1480. https://doi.org/10.1080/00207170110072895
- Deutscher, J., & Hippe, P. (2001). Parametric design of output feedback controllers in the frequency domain. In Proceedings of the 6th European Control Conference 2001 (pp. 3110-3114). Institute of Electrical and Electronics Engineers Inc..
- Hippe, P., & Deutscher, J. (2001). A windup prevention scheme for exponentially unstable SISO plants. In Proceedings of the 6th European Control Conference 2001 (pp. 3213-3218). Institute of Electrical and Electronics Engineers Inc..
- Hippe, P., & Deutscher, J. (2001). Time domain design of the reduced order H∞ filter. In Proceedings of the IFAC Symposium on System Structure and Control 2001. Prag, CZ.
- Reger, J. (2001). Deadlock analysis for deterministic finite state automata using affine linear models. In Proceedings of the 6th European Control Conference, ECC 2001 (pp. 3131-3136). Institute of Electrical and Electronics Engineers Inc..
2000
- Deutscher, J., & Hippe, P. (2000). A frequency domain approach to complete modal synthesis. In Proceedings of the Conference on Control System Design 2000. Bratislava, SK.
- Deutscher, J., & Hippe, P. (2000). Vollständige Modale Synthese im Frequenzbereich. At-Automatisierungstechnik, 48, 26-34. https://doi.org/10.1524/auto.2000.48.1.26
1999
- Deutscher, J., & Hippe, P. (1999). A frequency domain approach to the partial decoupling of non-minimum phase systems and non-decouplable systems. In Proceedings of the 5th European Control Conference 1999 (pp. 361-366). Institute of Electrical and Electronics Engineers Inc..
- Hippe, P. (1999). A windup prevention scheme for multiple integrating plants allowing for arbitrary reference step inputs. In Proceedings of the 1999 European Control Conference, ECC 1999 (pp. 3514-3518). Institute of Electrical and Electronics Engineers Inc..
- Wurmthaler, C., & Hippe, P. (1999). Systematic closed-loop design in the presence of input saturations. Automatica, 35(4), 689-695. https://doi.org/10.1016/S0005-1098(98)00199-X
1998
- Hippe, P., & Deutscher, J. (1998). Problems in the computational solution of the stationary discrete-time LQG problem. In Proceedings of the IFAC Conference on System Structure and Control 1998. Nantes, FR.
1997
- Hippe, P. (1997). Controller and plant windup prevention in MIMO loops with input saturation. In Proceedings of the 4th European Control Conference, ECC 1997 (pp. 1891-1896). Institute of Electrical and Electronics Engineers Inc..
1996
- Wurmthaler, C., & Hippe, P. (1996). Comments on "Dynamic compensation method for multivariable control systems with saturating actuators". IEEETransactions on Automatic Control, 41(10). https://doi.org/10.1109/9.539443
1994
- Hippe, P. (1994). A frequency-domain condition for L2-optimal reduced-order models. At-Automatisierungstechnik, 42, 78-79. https://doi.org/10.1524/auto.1994.42.112.78
1993
- Hippe, P. (1993). Design of the reduced-order Wiener-filter. At-Automatisierungstechnik, 41(7), 254-258. https://doi.org/10.1515/auto-1993-0707
1992
- Hippe, P. (1992). Design of MIMO compensators for systems with unmeasurable disturbances: The polynomial approach. Automatica, 28(5), 1003-1009. https://doi.org/10.1016/0005-1098(92)90154-8
- Hippe, P. (1992). Frequency weighted order reduction for compensator design. At-Automatisierungstechnik, 40(12), 447-453. https://doi.org/10.1515/auto-1992-1203
- Hippe, P. (1992). Inversion of Polynomial Matrices by Interpolation. IEEE Transactions on Automatic Control, 37(3), 363-365. https://doi.org/10.1109/9.119638
- Hippe, P. (1992). Reduced-Order wiener filter. International Journal of Systems Science, 23(12), 2413-2418. https://doi.org/10.1080/00207729208949467
1991
- Henneberger, K. (1991). Order reduction of discrete systems using a balanced and a equivalent state representation. At-Automatisierungstechnik, 39, 170-178. https://dx.doi.org/10.1524/auto.1991.39.112.170
1990
- Hippe, P. (1990). A nonminimal representation of reduced-order observers. Automatica, 26(2), 405-409. https://doi.org/10.1016/0005-1098(90)90137-7
- Hippe, P. (1990). Design of reduced-order observer-based compensators in the frequency domain. At-Automatisierungstechnik, 38, 274-278. https://doi.org/10.1524/auto.1990.38.112.274
- Hippe, P., & Wurmthaler, C. (1990). Optimal reduced-order estimators in the frequency domain: The discrete-time case. International Journal of Control, 52(5), 1051-1061. https://doi.org/10.1080/00207179008953583
1989
- Hippe, P. (1989). Design of reduced-order Kalman filters in the frequency domain. At-Automatisierungstechnik, 37, 219-225. https://doi.org/10.1524/auto.1989.37.112.219
- Hippe, P. (1989). Dynamic measuring of frequency and frequency oscillations in multiphase power systems. IEEE Transactions on Power Delivery, 4(1), 95-102. https://doi.org/10.1109/61.19193
1988
- Hippe, P. (1988). Comments on “FF-Pade Method of Model Reduction in Frequency Domain”. IEEE Transactions on Automatic Control, 33(4), 415-416. https://doi.org/10.1109/9.192206
- Hippe, P. (1988). Parameterization of the full-order compensator in the frequency domain. International Journal of Control, 48(4), 1583-1603. https://doi.org/10.1080/00207178808906271
1987
- Hippe, P. (1987). Design of pole placing controllers for stable and unstable systems with pure time delay. International Journal of Control, 45(6), 2173-2182. https://doi.org/10.1080/00207178708933874
- Hippe, P. (1987). Measuring the frequency oscillations in power supply systems with the aid of an observer-based filter. At-Automatisierungstechnik, 35, 487-494. https://doi.org/10.1524/auto.1987.35.112.487
- Hippe, P. (1987). Parametric compensator design. International Journal of Control, 45(4), 1455-1468. https://doi.org/10.1080/00207178708933821
- Hippe, P. (1987). The relation between pole-zero location and input-output behaviour of linear dynamical systems and its consequences for identification model order reduction and controller design. At-Automatisierungstechnik, 35, 411-417. https://doi.org/10.1524/auto.1987.35.112.411
- Wurmthaler, C., & Hippe, P. (1987). Comments on 'a regulating and tracking pi(d) controller'. International Journal of Control, 46(5), 1851-1856. https://doi.org/10.1080/00207178708934017
- Wurmthaler, C., & Hippe, P. (1987). Design of Optimal State Controllers in the Frequency Domain. At-Automatisierungstechnik, 35, 321-326. https://doi.org/10.1524/auto.1987.35.112.321
1985
- Hippe, P. (1985). Eine Bemerkung zur Pol-Nullstellen-Kompensation in Regelkreisen. At-Automatisierungstechnik, 33, 359-360. https://doi.org/10.1524/auto.1985.33.112.359
1983
- Hippe, P. (1983). Environ analysis of linear compartmental systems: The dynamic, time-invariant case. Ecological Modelling, 19(1), 1-26. https://doi.org/10.1016/0304-3800(83)90067-4
- Hippe, P. (1983). Systematische Auslegung von Zustandsregelkreisen im Frequenzbereich Systematic design of state controllers in the frequency domain. At-Automatisierungstechnik, 31, 403-409. https://doi.org/10.1524/auto.1983.31.112.403
1982
- Hippe, P. (1982). A measure for the influence of feedback control on the dynamics of linear, timeinvariant systems. At-Automatisierungstechnik, 30, 96-101. https://doi.org/10.1524/auto.1982.30.112.96
- Hippe, P. (1982). Correspondence:comments on ‘ further comments on “ minimal order observers for linear multivariable systems with unmeasurable disturbances ”. International Journal of Control, 36(5), 897-899. https://doi.org/10.1080/00207178208932941
1981
- Wurmthaler, C., & Hippe, P. (1981). A minimal-order servo compensator includung disturbance rejection. At-Automatisierungstechnik, 29, 155-164. https://doi.org/10.1524/auto.1981.29.112.155
- Wurmthaler, C., & Hippe, P. (1981). A simple method to design state controllers with disturbance rejection. At-Automatisierungstechnik, 29, 131-136. https://doi.org/10.1524/auto.1981.29.112.131
Projects
Energy-Efficient Electro-Photonic Integrated Circuits for High-Performance Computing
(Third Party Funds Group – Overall project)Term: 1. April 2025 - 31. March 2028
Funding source: Bayerische ForschungsstiftungPrototypical development of an Aceton / Isopropanol hydrogen storage system for stationary seasonal energy storage
(Third Party Funds Single)Term: 1. February 2025 - 31. March 2028
Funding source: Helmholtz-GemeinschaftAdvanced monitoring and optimization for robotic strain wave gears
(Third Party Funds Single)Term: 1. November 2024 - 30. April 2026
Funding source: IndustrieRealizability of advanced control concepts on FPGA hardware
(Third Party Funds Single)Term: 1. September 2024 - 31. May 2025
Funding source: IndustrieAI-Supported modeling for friction estimation
(Third Party Funds Single)Term: 1. September 2024 - 31. August 2025
Funding source: IndustrieReceding horizon time-optimal path parameterization for robotic manipulators
(Third Party Funds Single)Term: 1. July 2024 - 31. December 2025
Funding source: IndustrieOptimized Reinforcement Architecture for Complex Energy Management
(Third Party Funds Single)Term: 1. July 2024 - 30. June 2027
Funding source: IndustrieDevelopment of an innovative camera-based framework for collision-free human-machine movement
(Third Party Funds Single)Term: 1. February 2024 - 31. January 2026
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)OXO-LOHC: Autotherme und ultratiefe Wasserstoff-Freisetzung aus LOHC
(Third Party Funds Single)Term: 1. November 2023 - 31. October 2028
Funding source: Helmholtz-GemeinschaftRobust Reinforcement Learning for Thermal Management Control
(Third Party Funds Single)Term: 1. August 2023 - 31. July 2024
Funding source: IndustrieModel predictive flight control
(Third Party Funds Single)Term: 1. August 2023 - 31. July 2026
Funding source: IndustrieRobust energy-based control of MMC/HVDC systems
(Third Party Funds Single)Term: 15. June 2023 - 31. December 2026
Funding source: IndustrieHardware architecture, automatic control, autonomy functionality, and developer community: Modular learning control and planning for mobile professional operation vehicles
(Third Party Funds Group – Sub project)Overall project: POV.OS - Hardware and software platform for mobile professional operation vehicles
Term: 1. January 2023 - 31. December 2025
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)Formulation of dispersed systems via (melt) emulsification: Process design, in situ diagnostics and regulation
(Third Party Funds Group – Sub project)Overall project: Autonome Prozesse in der Partikeltechnik - Erforschung und Erprobung von Konzepten zur modellbasierten Führung partikeltechnischer Prozesse
Term: 1. January 2023 - 31. December 2025
Funding source: DFG / Schwerpunktprogramm (SPP)The aim of this project is the automated production of liquid-liquid disperse systems via melt emulsification, whereby in this process emulsification takes place at elevated temperature. The products obtained after cooling are dispersions of spherical nanoparticles or microparticles. Within the scope of this project, a melt emulsification device for the automated production of product particles with a well-defined particle size distribution (PSD) will be further developed. The PSD has a significant influence on the subsequent product properties, such as flow behavior or drug release kinetics. The PSD of the products is determined by the complex interaction of competing mechanisms. These are, in particular, droplet breakup in a rotor-stator device as a result of shear and elongation stress, as well as coalescence and further ripening, which in turn depend on the system composition, i.e. the emulsifier used (type, concentration) and the dispersion phase (viscosity, volume fraction). Therefore, for a better process understanding and an active process control, possibilities for in situ determination of the PSD are urgently required. In this project, a novel fiber-coupled measurement system based on broadband elastic light scattering is developed for in situ measurement of the PSD. The system will be validated on reference particle systems and applied to the emulsification process. Furthermore, a hybrid process model is developed, which is the basis for the design of a model predictive control of the process. The model predictive control in combination with the in situ measurement will provide the possibility for an active process control and the production of emulsions with predefined properties and a simultaneous optimization of the process time.Predictive and learning control methods
(Third Party Funds Group – Sub project)Overall project: AGENT-2: Agent-based data-driven modeling for stochastic and self-adjusting control of building energy systems
Term: 1. November 2022 - 31. October 2025
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)To achieve climate targets, CO2 emissions in the building sector have to be significantly reduced. However, the integration of renewable energy sources increases the complexity of building energy systems and thus the requirements for the operation strategy. Model-based and predictive controllers are necessary for efficient operation. However, due to the high complexity of the energy systems, the development, implementation, and commissioning are very complex leading to high costs, which is why model predictive and optimization-based control strategies are rarely used in practice so far. The goal of the AGENT-2 project is to develop a self-adjusting and self-learning model-predictive control concept that reduces the implementation and commissioning effort and thus increases the applicability of efficient operating strategies in practice. The control concept to be developed is based on distributed agents, each of which learns the system behavior of a subsystem and controls the subsystem. This is based on the findings and the framework developed in the previous project AGENT. The operation of the overall system is achieved by the interaction oft h e self-learning agents with each other. Thus, a self-adjusting and scalable control strategy for building energy systems is created. The self-learning control strategy is compared with state-of-the-art concepts in simulations and tested in practical operation in two demonstration buildings. The findings will be generalized and possibilities for the transfer into practice will be investigated. The project thus contributes to increasing the efficiency of building operation and to reducing the costs of controller implementation and commissioning.Robust Planning and Control using Probabilistic Methods
(Third Party Funds Group – Sub project)Overall project: Verbundprojekt MANNHEIM-AUTOtech.agil: Architektur und Technologien zur Orchestrierung automobiltechnischer Agilität
Term: 1. October 2022 - 30. September 2025
Funding source: Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR)Cooperative manipulation with dual-arm robots at the payload limit
(Third Party Funds Single)Term: 1. September 2022 - 31. August 2025
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)Dual-armrobots offer a high potential for automation technology, as they canbe used to implement tasks that are not possible with one arm alone.This includes in particular the manipulation of large or heavyobjects that exceed the payload of a single arm. Illustrativeexamples are the movement of beverage crates, long boards or pipes,which are also preferably grasped by humans with both hands.
However,cooperative manipulation is particularly challenging, because botharms and the grasped object form a closed kinematic chain. Thecorresponding constraints reduce the number of degrees of freedom andmust be taken into account on the levels of control, trajectory andpath planning. Conversely, the system has the advantage that the loadcan be flexibly distributed on both arms due to the redundantactuators. This is especially crucial for heavy objects, since it isthe only way to comply with actuator torque constraints. The firstgoal of the research project is therefore the development of adynamic load distribution that explicitly takes actuator constraintsinto account and is thus suited for high payloads. To this end, anoptimization-based approach is pursued with a focus on efficiency andreal-time capability.
Moreover,this load distribution must be taken into account on all systemlevels, since otherwise large payloads can lead to the situation thatno admissible trajectory can be computed for a path or that atrajectory is not executable by the controller. Consequently, thesecond goal is the consistent consideration of the dynamic loaddistribution. On the control level, this includes not only theisolated solution of the optimal load distribution in each samplingstep, but also the approach of a forward-looking model predictivecontroller. For trajectory planning, on the one hand, a time-optimaltrajectory generation with subordinate solution of the dynamic loaddistribution and, on the other hand, the extension of the modelpredictive controller to a predictive path-following controller shallbe investigated. Furthermore, a path planner for dual-arm robots willbe developed for the first time, which explicitly considers thepayload and can be extended in a modular manner to take collisions aswell as the additional degrees of freedom of a mobile base intoaccount.
Thethird goal is the extensive experimental validation of the control,trajectory and path planning methods in order to practicallydemonstrate the potential of cooperative manipulation with dual-armrobots. For this purpose, a mobile dual-arm robot with additionalmotion capturing system from the DFG major instrumentation proposal438833210 is available at the Chair of Automatic Control. Inparticular, movements with large and heavy objects shall beperformed, whose mass is in the order of magnitude of the combinedmaximum payload of both arms.Feasibility of stochastic model predictive control for autonomous driving
(Third Party Funds Single)Term: 1. August 2022 - 31. December 2022
Funding source: IndustrieControl of ring resonator modulators in optical communication
(Third Party Funds Single)Term: 1. February 2022 - 31. January 2025
Funding source: IndustrieDistributed model predictive control of nonlinear systems with asynchronous communication
(Third Party Funds Single)Term: 1. January 2022 - 31. December 2024
Funding source: Deutsche Forschungsgemeinschaft (DFG)Anomaly detection and intelligent recalibration of sensorized systems
(Third Party Funds Single)Term: 1. November 2021 - 31. October 2024
Funding source: IndustrieKI-unterstützte Modellierung zur Steigerung der Regelgüte
(Third Party Funds Single)Term: 1. July 2021 - 30. June 2024
Funding source: IndustrieKinesthetic teaching and predictive control of interaction tasks in robotics
(Third Party Funds Single)Term: 1. July 2021 - 30. June 2024
Funding source: Deutsche Forschungsgemeinschaft (DFG)Precise interactions as part of industrial manufacturing tasks are typically very complex to characterize and implement. One reason for this is the heterogeneity of the task-specific requirements for the motion and control behavior. A direct implementation of the task into a robot program therefore requires highly qualified specialists and is only profitable for large lot sizes. For a flexible applicability and easy (re-)configuration of the robot system, an approach to programming by kinesthetic demonstration is developed in this project. The robot is guided by the user through the entire manipulation task, while the robot motion as well as the interaction forces are simultaneously recorded. Typically, several repetitions of the demonstration are necessary in order to compensate for the suboptimality and imprecision of the human demonstration. This is particularly important for complex motion sequences or interaction situations, such as periodic movements or the assembly of components, that are difficult to demonstrate but at the same time are crucial for a successful task execution. The basis for this project is a previously developed general framework for model predictive interaction control (MPIC). The manipulation task is split into a sequence of elementary tasks, so-called manipulation primitives (MPs) with individual motion and control characteristics, which are treated in a holistic manner by a model predictive control approach. The MPIC approach is elaborated in this project regarding the kinesthetic demonstration of manipulation tasks, e.g. by considering the switching between MPs over the prediction horizon of the MPC. A further focus lies on the automatic generation of the MP sequence from the repeated demonstration of the manipulation task without requiring additional expert knowledge. Based on the demonstration, the manipulation task will be iteratively refined by learning the setpoints and the transition conditions of the MPs and finally by optimizing the overall manipulation task.Innovative Regelungs- und Steuerungsstrategien für Druckerhöhungsanlagen - TP Erlangen
(Third Party Funds Group – Sub project)Overall project: Innovative Regelungs- und Steuerungsstrategien für Druckerhöhungsanlagen
Term: 1. July 2021 - 30. June 2024
Funding source: Bayerische ForschungsstiftungRobust control of modular multi-level converters
(Third Party Funds Single)Term: 16. June 2021 - 31. December 2024
Funding source: IndustrieMotion planning for driving simulators
(Third Party Funds Single)Term: 1. January 2021 - 30. June 2021
Funding source: IndustrieThermische Umrichtermodellierung für elektrische Antriebssysteme
(Third Party Funds Single)Term: 1. August 2020 - 31. July 2023
Funding source: IndustrieRegelung des Antriebsstrangs beim Kaltwalzen
(Third Party Funds Single)Term: 1. July 2020 - 31. August 2023
Funding source: IndustrieAutomated path planning for truck-trailer configurations
(Third Party Funds Single)Term: 1. September 2019 - 31. August 2022
Funding source: IndustrieModulare und hierarchische Ansätze für die Regelung nebenläufiger zeitbewerteter ereignisdiskreter Systeme
(Third Party Funds Single)Term: 15. July 2019 - 14. July 2022
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)Neue Technologien haben zur Entwicklung von Systemen geführt, die weitgehend autonom agieren und typischerweise aus einer Vielzahl vernetzter Komponenten bestehen. Die Komplexität solcher Systeme erfordert neuartige Ansätze zur Modellierung und Reglersynthese, um die gewünschte Funktionalität zu garantieren. Ereignisdiskrete Systeme (discrete-event systems, DES) sind Modelle, deren Dynamik durch das Auftreten asynchroner Ereignisse charakterisiert wird. Solche Modelle eignen sich für viele "man made Systems", wie beispielsweise automatisierte Transportvorrichtungen und flexible Fertigungsanlagen. Die Modellierung ereignisdiskreter Systeme erfolgt mit aus der Informatik bekannten Beschreibungsmitteln, wie etwa endlichen Automaten, formalen Sprachen oder Petri-Netzen. Zur Reglersyn these hat sich die sog. "supervisory control theory" etabliert, bei der der Regler bzw. supervisor aus vergangenen Ereignissen ableitet, welche Ereignisse aktuell unterbunden werden müssen, um einen wunschgemäßen Ablauf des geregelten Systems zu gewährleisten. Eine zentrale Herausforderung ist hierbei die in der Komponentenzahl exponentiell wachsende Zahl von Zuständen des Gesamtsystems. Dieser begegnet man durch modulare oder hierarchische Ansätze, die das explizite Erstellen eines Gesamtmodells umgehen. In ihrer Grundform beschreiben ereignisdiskrete Systeme nur die Reihenfolge der Abfolge von Ereignissen. Dies reicht aus, um Regler zu entwerfen, die einen sicheren und zielführenden Betrieb des geregelten Systems garantieren. In vielen Anwendungen spielt aber neben Sicherheit auch Performanz eine Rolle. Letztere bezieht sich i.A. nicht nur auf die Reihenfolge sondern auch auf die Zeitpunkte, zu denen Ereignisse auftreten. Dazu bietet die Literatur eine Auswahl von Modellformen, die sich hinsichtlich ihrer Ausdrucksstärke deutlich unterscheiden. Am unteren Ende rangieren Ansätze nach Brandin/Wonham, bei denen das Verstreichen von Zeit durch das globale Ereignis "tick" abgebildet wird, sowie sog. zeitbewertete Ereignisgraphen (timed event graphs, TEGs), deren Verhalten sich als Lösungen linearer (max,+)- Gleichungen darstellen lässt. Für beide Ansätze ist die Reglersynthese gut erforscht. Allerdings wird die hier verfügbare Ausdrucksstärke vielen Anwendungen nicht gerecht: Modelliert man nach Brandin-Wonham, so lassen sich nebenläufige Prozesse, die mehrere unabhängige Echtzeituhren erfordern, nicht darstellen; verwendet man zeitbewertete Ereignisgraphen, so können logische Verzweigungen nicht dargestellt werden. In diesem Projekt wollen wir effiziente Methoden zur ereignisdiskreten Regelung für Modellformen untersuchen, die in ihrer Ausdrucksstärke über die beiden genannten Ansätze deutlich hinaus gehen. Wir streben insbesondere an, mit Hilfe modularer und hierarchischer Methoden für sog. (max,+)-Automaten und ausgewählt strukturierte Petri-Netze Regler zu entwerfen, die gegebene Anforderungen hinsichtlich Korrektheit und Performanz garantieren.Agent-based systems for intelligent and robust control of complex energy systems in non-residential buildings as part of a superordinate energy system
(Third Party Funds Group – Sub project)Overall project: Agentensysteme zur intelligenten und robusten Steuerung komplexer Energiesysteme in Nichtwohngebäuden als Bestandteil des übergeordneten Energiesystems
Term: 1. May 2019 - 31. December 2022
Funding source: Bundesministerium für Wirtschaft und Energie (BMWE)Formale Verifikation in der Fertigungsautomatisierung (Projektabschnitt B1)
(Third Party Funds Single)Term: 15. April 2019 - 14. April 2020
Funding source: Siemens AGTrajectory planning for off-road applications
(Third Party Funds Single)Term: 1. April 2019 - 31. October 2021
Funding source: IndustrieModular distributed model predictive control of nonlinear systems with neighborhood models
(Third Party Funds Single)Term: 1. April 2019 - 31. December 2020
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)The steadily growing demands on efficiency and flexibility of modern automation and control systems requires a broader design approach for the overall system that goes beyond the isolated look at and control of single subsystems. Decentral and distributed control schemes follow this holistic design approach by including the interdependencies between the subsystems in the control design.Model predictive control (MPC) appears to be a suitable control approach to tackle these kind of systems. In essence, MPC relies on the numerical solution of a finite-horizon dynamic optimization problem that is repetitively solved according to the sampling rate of the system. An extension of MPC to coupled systems is distributed MPC (DMPC), which assigns a single communicating MPC agent to each subsystem. The goal of the project is to develop a DMPC scheme for nonlinear coupled systems, where each MPC agent contains a neighborhood model that anticipates the dynamical behavior of its neighbors in order to enhance the convergence and robustness of the distributed algorithm. Besides the development and mathematical investigation of the methodology, a further goal of the project is the numerical and experimental realization of the control approach. A particular intention of the project is to develop a modular framework that allows for an easy configuration and adaptation of the coupling structure for suitable system classes.Compliance for a robotic assistance system
(Third Party Funds Single)Term: 1. April 2019 - 30. September 2022
Funding source: IndustrieFormale Verifikation in der Fertigungsautomatisierung (Projektabschnitt A)
(Third Party Funds Single)Term: 15. April 2018 - 14. April 2019
Funding source: Siemens AGFehlerdiagnose verteilt-parametrischer Systeme mittels Modulationsfunktionen
(Third Party Funds Single)Term: 1. April 2018 - 31. March 2021
Funding source: DFG-Einzelförderung / Sachbeihilfe (EIN-SBH)Systematischer Entwurf hierarchisch-hybrider Regler
(Third Party Funds Group – Sub project)Overall project: FOR 468: Methods from discrete mathematics for the synthesis and control of chemical processes
Term: 1. January 2006 - 30. January 2011
Funding source: DFG / Forschungsgruppe (FOR)Ziel des beschriebenen Forschungsvorhabens ist die Weiterentwicklung eines in der ersten Antragsphase untersuchten Verfahrens zum hierarchischen Entwurf hybrider Regelsysteme. Das genannte Verfahren ermöglicht es, sowohl ingenieurwissenschaftliche Intuition und regelungstechnische Standardverfahren als auch moderne Methoden der diskreten Optimierung auf sichere Weise in einen formalen Entwurfsvorgang einzubinden. Es trägt so zur Beherrschbarkeit der hybriden Regelproblemen innewohnenden Komplexität bei und wurde in der ersten Antragsphase erfolgreich auf eine Mehrprodukt-Batchanlage angewandt. Um das Verfahren zu einer praxistauglichen Entwurfsmethode zu machen, sind eine Reihe von methodischen Weiterentwicklungen notwendig. Diese betreffen strukturelle Fragen hinsichtlich der hierarchischen Reglerarchitektur, Fragen der effizienten Berechnung diskreter Abstraktionen durch sichere Abschätzung erreichbarer Zustandsmengen sowie algorithmische Fragen beim Entwurf ereignisdiskreter Reglerebenen. Die praktische Anwendbarkeit des resultierenden hierarchischen Entwurfsverfahrens soll anhand eines strukturvariablen chromatographischen Trennprozesses nachgewiesen werden.
Research
Control & Optimization
The development of control and optimization methods for dynamical systems is the natural research focus of the Chair of Automatic Control. In particular, we focus on nonlinear and predictive control concepts as well as path/trajectory planning for dynamical systems closely related to optimization-based methods, always having an eye on the real-time and embedded realization for practical applications.
Learning in Control
Algorithms of artificial intelligence and machine learning are of increasing importance for control applications. Our research and expertise in this domain ranges from the modeling of unknown or uncertain dynamics over iterative and reinforcement learning to Bayesian optimization.
Discrete Event Systems
Discrete event systems (DES) are dynamical systems with a finite-range state variable. Prototypical application domains are so called “men made systems”, e.g., for automated manufacturing or logistics, which by construction can be adequately represented by discrete-event models. Our DES research group develops methods for the analysis and synthesis of discrete-event systems with a particular focus on modular and/or hierarchical control architectures.
Mechatronics & Automotive
Mechatronic systems consist of both mechanical and electrical components. Typical challenges are the high integration of these systems along with the limited computational resources of embedded hardware such as electronic control units (ECUs) in automotive applications. We have a successful history of bridging the gap between theory and practice in close cooperation with industrial partners from the mechatronics and automotive domain.
Robotics
Robotics deals in general with machines that can assist or perform the execution of tasks such as assembly or machining tasks by industrial robots. Research projects in this area concern, for example, the control of motions and forces in human-robot interaction as well as the planning of paths and trajectories for mobile and collaborative robots.
Energy Solutions
The energy-efficient operation of technical systems is of increasing importance in view of global warming and the transition to renewable energies. Control systems engineering has a high potential to contribute to the efficient use of energy, for example, regarding energy consumption of buildings, energy conversion and storage, as well as power grids. Our research in terms of optimization and learning-based control methods forms the ideal basis to develop sustainable solutions in energy-related applications.
Projects & Publications
The chair works on research projects in cooperation with industrial partners and public funding bodies such as the German Research Foundation (DFG). An overview of ongoing and completed projects can be found in this section.
The Chair publishes papers in renowned international conferences and journals. A list of publications produced at the chair can be found here.
Discrete Event Systems
The research group FGDES develops methods for the analysis and sythnesis of discrete-event systems with a particular focus on modular and/or hierarchical architectures. Here, discrete-event systems are dynamical systems with a finite-range state variable. Prototypical application domains are so called “men made systems”, e.g., for automated manufacturing or logistics, which by construction can be adequately represented by discrete-event models.
Contact
Prof. Dr.-Ing. Thomas Moor
Tel.: +49 9131 85-27129
E-Mail | FGDES Homepage
How to generate a PLC-program that operates the plant? The laboratory model below represents a flexible manufacturing system. It consists of 29 interacting electro-mechanical components (conveyor belts, pusher, stack-feeder etc.), equipped with 25 actuators (DC-motors) and 57 sensors (key-switches, inductive sensors). The traditional engineering solution to operate the manufacturing system is to program a logic controller (PLC) such that it activates the appropriate motors in reaction on sensor events. This approach crucially relies on the programmer, who must consider any possible configuration of the system. While methods from software engineering assist the programmer and increase productivity, the process by principle remains error prone and unsafe.
Control Theory for Discrete Event Systems! The manufacturing system can be formally modelled as a discrete-event system (DES). In contrast to continuous states and continuous time used in physically motivated models, discrete-event systems are characterized by discrete and qualitative changes of (symbolic) state values caused by the occurrence of asynchronous discrete events. In the context of our example, the control theoretic perspective on this system class is of a particular interest: given the formal model of the manufacturing system (plant dynamics) and the desired behaviour (formal specification), how can one systematically derive the required PLC program (controller dynamics) that makes ends meet?
Supervisory control theory (SCT) is a framework that provides an answer to the above question, first proposed by P.J. Ramadge and W.M. Wonham in the late 1980s. Since then, many researchers have contributed, including our group, with a particular focus on hierarchical, decentralized and/or modular control system architectures. At the time of writing, the required controller dynamics for systems of the complexity as our laboratory model can be synthesised easily by methods from supervisory control theory. Ongoing projects address the integration of synthesis algorithms with the work-flow of PLC programming, open questions related to fault detection and diagnosis, as well as network implementations of distributed supervision.
Further Directions: The research group FGDES provides the software tools libFAUDES, DESTool, CompileDES and FlexFact via the FGDES homepage.
Selected publications
- Tang Y, Moor T (2021). Compositional Verification of Finite Automata under Event Preemption. In 60th IEEE Conference on Decision and Control (CDC) (pp. 301-308). NEW YORK. [DOI].
- Tang Y, Moor T (2022). Compositional Verification of Non-Blockingness with Prioritised Events. In 16th IFAC Workshop on Discrete Event Systems (WODES) (pp. 236-243). IFAC-PapersOnLine, pp. 236-243. AMSTERDAM. [DOI].
- Triska L, Moor T (2022). Abstraction Based Supervisory Control for Non-Regular ∗-Languages. In 16th IFAC Workshop on Discrete Event Systems. [DOI].
- Triska L, Moor T (2020). Behaviour Equivalent Max-Plus Automata for a Class of Timed Petri Nets. In 15th IFAC Workshop on Discrete Event Systems. [DOI].
- Triska L, Moor T (2021). Behaviour equivalent max-plus automata for timed petri nets under open-loop race-policy semantics. Discrete Event Dynamic Systems: Theory and Applications, Topical Collection on Control 2022. [DOI].
- Schmuck AK, Moor T, Majumdar R (2018). On the Relation between Reactive Synthesis and Supervisory Control of Input/Output Behaviours. In Workshop on Discrete Event Systems (pp. 31-38). IFAC-PapersOnLine, 51(7), 31-38. [DOI].
A more comprehensive list is given on the FGDES homepage.